PhotoRobot虚拟走秀首次使用指南

本用户手册提供了PhotoRobot虚拟走秀的基本理解和功能作的技术信息。该项目旨在支持最近购买设备的PhotoRobot客户,并简化新技术的入门流程。这包括虚拟走道的一般设备概述、连接设备到网络的说明以及首次使用系统的步骤。
注意:在首次使用前,请务必参考PhotoRobot安全信息与说明书,同时还要参考设备附带的说明书。
重要:PhotoRobot设备的初始安装必须始终由授权的PhotoRobot主管部门进行。有权安装PhotoRobot的主管部门是经批准的分销商,或制造商的代表。
PhotoRobot 走秀首次使用指南
感谢您,也祝贺您购买了PhotoRobot虚拟走秀。您的PhotoRobot设备代表了数十年来在自动化摄影领域的第一手经验、洞察力和创新。其设计也考虑到了您和每位客户独特的业务。PhotoRobot 采用模块化设计,支持广泛的应用场景,每个具体案例都有助于为整个 PhotoRobot 生态系统带来益处。请使用以下文档来熟悉PhotoRobot解决方案,并了解首次使用设备的说明。
遇到问题时,请参阅PhotoRobot故障排除,了解硬件、机器人、摄像机、灯光、剪辑和后期制作常见问题的解决方案。
1. 设备描述 - PhotoRobot虚拟走秀
PhotoRobot的虚拟T台运营后,成为一条无限360度时尚摄影和视频T台。该装置由一台运行机安装在旋转平台上,平台可360度旋转。同时,摄像机仍固定在站台周围,拍摄出带有飞行摄像效果的照片和视频。该工作站适合使用模型进行360度产品摄影,或在皮带未运行时拍摄中大型物体。平台的进出也非常方便,速度可调,行驶时更稳定。

PhotoRobot 走秀的关键技术特点包括:
- 可定制运动控制(可远程调节转盘旋转和跑步机速度,从0到10公里/小时,完美适应任何车型)。
- 进出都很方便(转弯平台的宽板通过支撑固定,以增强稳定性和安全性)。
- 所有东西集中在一个地方(不需要频繁搬动)。
- 可调节水平(可直接安装猫道,使其与工作区齐平)。
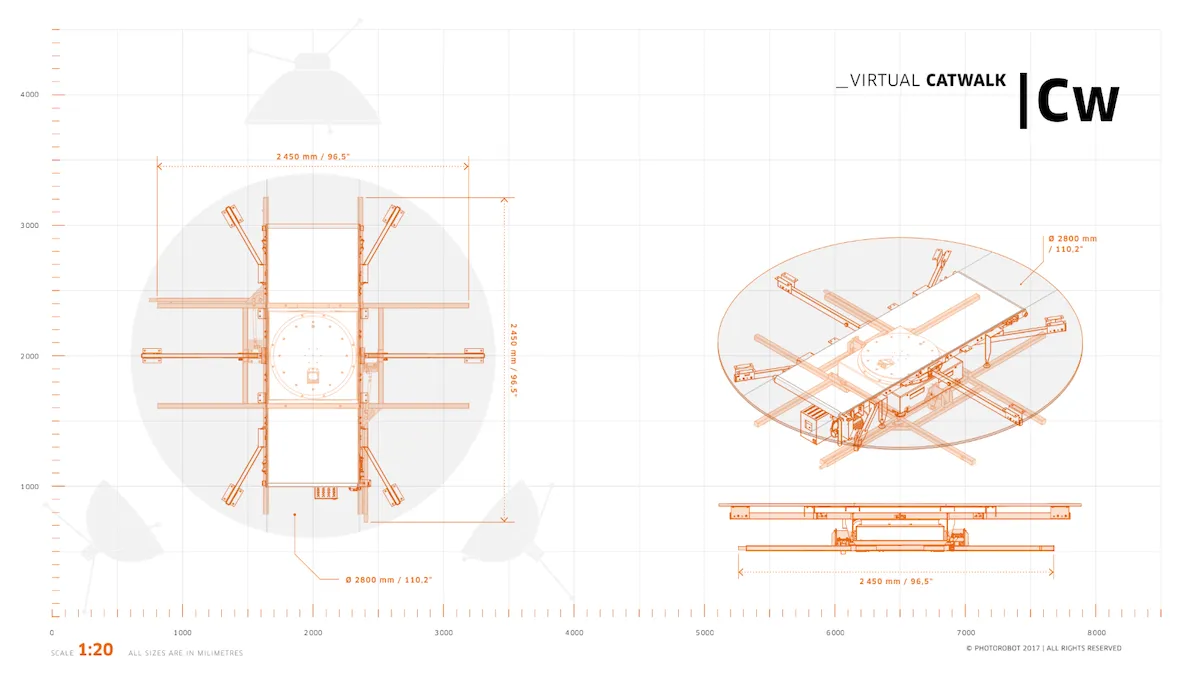
1.1 设备概述 - 虚拟走秀
PhotoRobot虚拟猫道尺寸为7 x 7米,涵盖了转盘的旋转动力学与行走带的结合。这使得移动方向有两个方向。有步行式跑步机式皮带的运动,以及能够同时旋转的旋转平台,皮带在运行时也能同步旋转。同时,对移动方向和速度的完全控制以及移动边缘支撑,在设备运行过程中提供了安全和稳定性。

1.2. 虚拟走秀的主要组成部分
1.2.1. 机器内置大型驱动电机,实现跑步机0至10公里/小时的可调速度控制,驱动平台360度旋转。

1.2.2. 注意控制单元的位置不在猫道内。相反,控制单元与机器分离,通常安装在专用的PhotoRobot HD机架内。
1.2.3. 如果设备不用于录制视频,可以拆除皮带,改用唱盘进行360度产品摄影。这在RotoPower模式下可实现,也可以配合可选的PhotoRobot机器人臂扩展。

2. PhotoRobot 走道首次使用之前
在首次使用 PhotoRobot 之前,有必要了解 PhotoRobot 解决方案的本质。PhotoRobot 技术上是一个模块化单元,由硬件和软件组件组成。这需要 PhotoRobot 连接到与运行它的计算机相同的网络。
重要:关于连接PhotoRobot到网络的技术作要求和说明,请务必参考PhotoRobot首次使用及基础测试。
一般来说,必须满足以下作前提条件。
- 控制单元必须连接到本地网络。
- 计算机必须运行服务 GUI 或操作员的软件 _Controls。
- 计算机必须通过与控制单元相同的网络进行连接。
- 必须有网络上的正常互联网连接。

此外,电力配电系统的参数必须符合要求(例如电压和频率)。作方法是使用控制单元背面的RJ45连接器。如果控制单元的设置不合规,先设置好。为此,请找到控制单元背面的手动电压选择器。然后,通过RJ45连接器将控制单元通过以太网线连接到网络。

虚拟猫道的运行需要以下网络配置。
- 网络中的 DHCP 服务器是强制性的。
- 必须允许 TCP 端口 7777、7778 通信。
- 必须允许端口 6666 上的 UDP 广播。
- 互联网连接是强制性的。
- *.必须允许 photorobot.com 访问。
- 必须允许 as-unirobot.azurewebsites.net 访问。
- 请参阅 PhotoRobot 网络的前提条件与配置,以确认正确设置并根据需要进行故障排除。
- 将电源插头连接到电源插座。
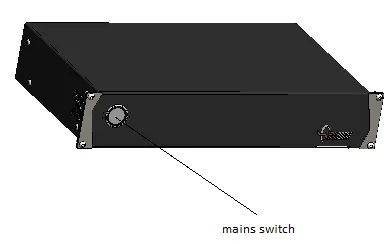
最后,按下控制单元的主电源开关。当状态发生变化时,灯光停止闪烁,转为连续灯,表示控制单元准备工作。
2.1. 查找 PhotoRobot 在局域网中的 IP 地址
要定位虚拟 CATWALK 和其他 PhotoRobot 设备的 IP 地址,PhotoRobot Locator 应用程序直接集成在 CAPP 中。这使得在网络上搜索和识别控制单元变得更容易,而无需使用外部应用程序。 请确保您使用的是最新版本的 CAPP 以访问此功能。
然后,要在 CAPP 中直接识别网络上的机器人,请打开 CAPP 的本地版本,转到“设置”,然后点击机器人 / 控制单元。

“机器人 / 控制单元”菜单显示包含“名称”、“网络”、“单元”、“版本”、“已发现”和“识别”的列,对应每个机器人。如果机器人名称左侧的点是绿色,则表示它在线。单击机器人字段将打开机器人的网站界面。这还将使机器人控制单元上的 LED 灯闪烁绿色,以便于识别。
如果客户需要外部下载应用程序,PhotoRobot Locator 也可在 PhotoRobot 账户下载中提供 iOS 下载。

注意:Android 版的 PhotoRobot Locator 已停产。
此外,还有适用于 MacOS 或 Windows 的 FRFind 命令行实用程序,用于搜索网络并识别 PhotoRobot 控制单元。您也可以通过 PhotoRobot 账户下载页面找到下载 FRfind 的链接。
然后,在找到 PhotoRobot 设备后,复制 IP 地址,并将 PhotoRobot 的 IP 地址以 URL 格式粘贴到任何网络浏览器中。如果成功,服务 GUI 将启动,显示一个用于测试 PhotoRobot 的基本用户界面。
2.2. PhotoRobot走道的电源
在设备的服务图形界面中,接着用绿色电源按钮“ Motor ON”开机。

2.3. 运行PhotoRobot走道基础测试
最后,要测试 PhotoRobot 是否完全运行,请使用服务 GUI 界面控件将平台旋转到任何所需的角度。

- 启动引擎(箭头1),尝试旋转(箭头2)。
- 如果机器人遵循动作指令,您的PhotoRobot设备即可正常运行。
3. PhotoRobot _Controls软件
软件PhotoRobot _Controls应用程序提供对整个虚拟 Catwalk 机器人工作站的控制。这包括对所有机器人、摄像头和照明的远程控制。该软件管理工作流程并提供后处理领域有效自动化所需的功能。

重要提示:PhotoRobot _Controls App 软件可通过您的PhotoRobot账户下载。它不包含在机器配送中;它是与机器单独购买的。
注意:有关使用PhotoRobot _Controls软件的详细信息和技术指导,请参阅PhotoRobot入门指南。
4. 信息标签
4.1. 符号概述

4.2. 机器与组件标签
关于特定机器和组件的标签,请参阅《PhotoRobot 安全信息与说明》文档中的“信息标签”(3.1.)部分。


EOS Rebel 系列


EOS DSLR 系列


EOS M 微 单镜系列


PowerShot 系列


特写/ 手持

佳能 EOS Rebel 系列提供适合初学者的 DSLR 相机,具有稳定的图像质量、直观的控制和多功能功能。这些相机是摄影爱好者的理想选择,提供可靠的自动对焦、可变角度触摸屏以及全高清或 4K 视频录制。
连接
分辨率 (MP)
分辨率
佳能 EOS DSLR 系列提供高质量的图像、快速的自动对焦和多功能性,使其成为摄影和视频制作的理想选择。
连接
分辨率 (MP)
分辨率
佳能 EOS M 微单镜系列将紧凑的设计与类似 DSLR 的性能相结合。这些相机具有可更换镜头、快速自动对焦和高质量图像传感器,非常适合在不牺牲图像质量的情况下寻求便携性的旅行者和内容创作者。
连接
分辨率 (MP)
分辨率
佳能 PowerShot 系列为休闲拍摄者和爱好者提供紧凑、用户友好的相机。从简单的傻瓜相机到高级变焦相机,它们提供便利性、稳定的图像质量以及图像稳定和 4K 视频等功能。
连接
分辨率 (MP)
分辨率


