PhotoRobot 机器人唱盘与机械臂 V8 用户指南

以下文档为PhotoRobot机器人转盘(配备机械臂V8扩展)的用户手册。本手册仅供最近购买设备的PhotoRobot客户使用。其目的是帮助机器人工作站的初步理解、基础测试和首次运行。查找带有机械臂扩展的机器人转盘详细介绍,包括工作站概览及首次使用和安装PhotoRobot的说明。
重要:PhotoRobot设备的初始安装必须始终由授权的PhotoRobot主管部门进行。有权安装PhotoRobot的主管部门是经批准的分销商,或制造商的代表。
注意:在首次使用前,请务必参考PhotoRobot安全信息与说明书,同时还要参考设备附带的说明书。
配备机械臂V8扩展的机器人转盘
祝贺并感谢您购买您的PhotoRobot设备!PhotoRobot 代表了数十年来自动化摄影的第一手经验和创新。它提供针对独特需求的技术,同时提供支持PhotoRobot客户的现成解决方案生态系统。时尚且巧妙,PhotoRobot 承诺每次开机都能带来更简单、更快、更稳定的制作体验。欢迎来到PhotoRobot。
1. 工作站描述 - 机器人转盘与机械臂V8
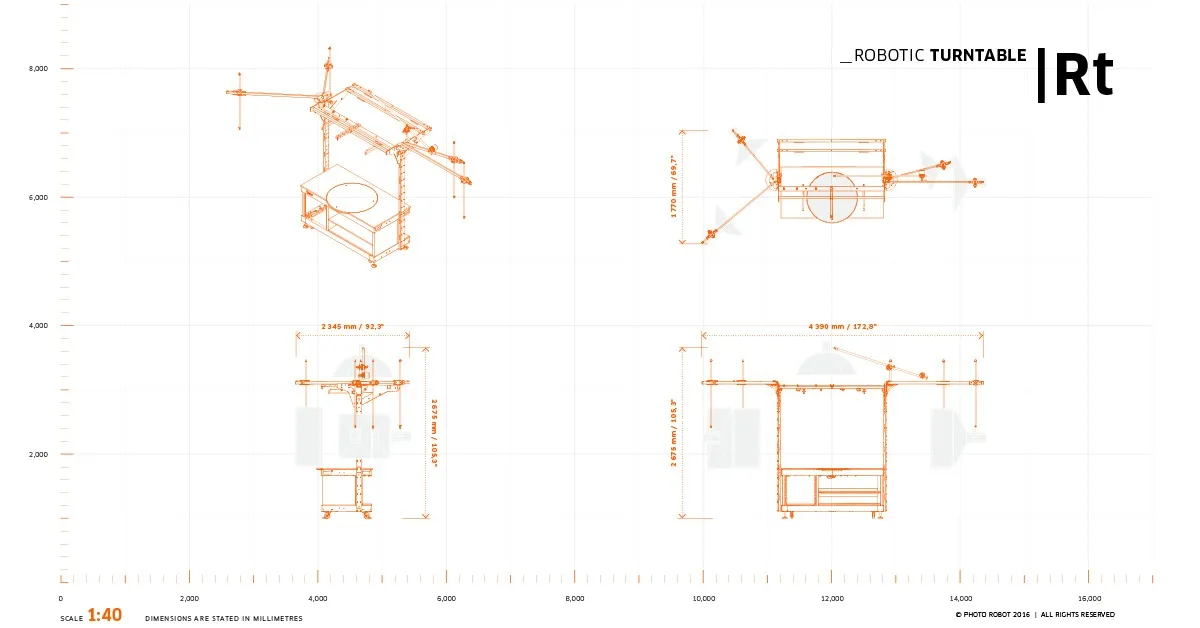
PhotoRobot的机器人转盘配备机械臂V8扩展,作为通用电动转盘,用于360度重物产品摄影。转盘可承托重达200公斤的小型但较重的物品,如工具、发动机、汽车零件、铣床及其他重物。结合机械臂V8,该工作站简化并加速了360度旋转和多行3D摄影。机械臂将图像捕捉以及安装摄像头的移动与转盘上物品的旋转同步。这使得可以快速360度捕捉多行环绕物品,包括上下视图,实现简化的3D图像捕捉。

机器人转盘与机械臂组合的主要功能包括:
- 重型转盘,具有耐磨性和200公斤的高承重能力。
- 唱盘板,带有悬垂,悬垂在桌边,用于零角度拍照。
- 激光制导物体定位,始终找到旋转的绝对中心。
- 转盘框架内部集成了照明和布线支架。
- 远程摄像机与自动转盘旋转同步。
- 摄像机沿精确轨迹平滑移动,且摄像臂无震荡。
- 对接站便于运输和安装机械臂。
1.1. 录音室集成 - 机器人唱盘与机械臂V8
在工作室内,机器人唱盘支持拍摄小型但较重的物体,而机械臂V8则拥有较大的安装范围。这使得在使用工作站时,三脚架云台和相机的选择更加灵活。与此同时,机械臂结构坚固,动作精准,并有两种尺寸的相机臂,用于捕捉不同尺寸的物体。可以远程控制机械臂,并与唱盘和演播室灯光同步,实现完全自动化图像捕捉,生成高度逼真的3D照片。
1.2. 控制单元 - 机器人转盘与机械臂V8
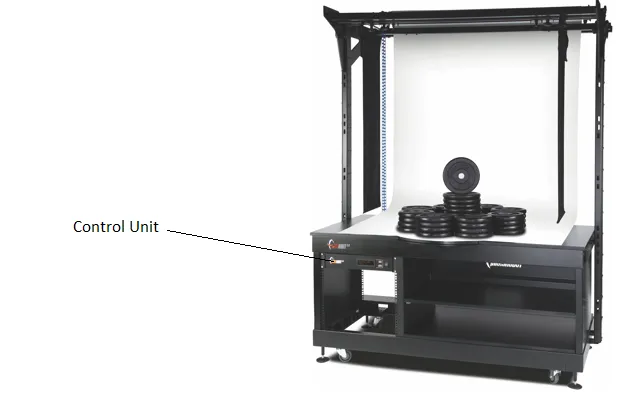
配备机械臂V8扩展的机器人转盘的主要部件之一是控制单元。 控制单元 是系统的核心组成部分,负责为机器人转盘和机械臂V8的所有运动供电和控制。
控制单元不是机械臂的物理部分。相反,如果两个设备同时交付,控制单元会物理安装在机器人转盘内。控制单元被放置在机器人转盘机体左上角前方的专用HD机架中。与此同时,机械臂V8发动机在使用时会与机械臂并排对接。

1.3. 机械臂V8扩展概述
PhotoRobot 机械臂 V8 兼容大多数 PhotoRobot 旋转唱盘和自动 360 度摄影设备。它与PhotoRobot机器人如无中心桌、立方体、转盘平台、C级转盘等协同工作。

机械臂 V8 的关键部件包括:
- 控制单元 (用于控制唱臂及兼容唱盘的独立装置)
- 相机安装柄 (一个短,一个长,或两者)
- 机床上装有可伸缩轮子以便移动。
- 扩展坞 ,方便快速设置兼容唱盘和设备。
此外,摄像臂不振荡,因此摄像机始终沿精确轨迹移动。此外,安装范围广泛,灵活选择三脚架云台和相机,并具备便捷的运输和安装功能。
注意: 有关该装置的组装、作及首次使用的技术说明,请参阅 机械臂V8用户手册 。
2. 首次使用PhotoRobot之前
如果首次使用 PhotoRobot,首先需要从技术角度理解 PhotoRobot 解决方案。PhotoRobot 是一个模块化单元,由硬件和软件组件组成。这需要计算机来作 PhotoRobot,同时 PhotoRobot 本身也必须与运行它的计算机连接在同一网络上。然后,网络必须连接互联网,才能访问运行在云端的PhotoRobot服务。
注意:请参见PhotoRobot首次使用及基本测试,以确保符合连接网络的技术要求。
一般来说,存在以下基本作要求。
- 控制单元必须连接到本地网络。
- 运行服务 GUI 或操作员的软件称为 _Controls 需要计算机。
- 计算机必须通过与控制单元相同的网络进行连接。
- 网络上必须有有效的互联网连接。

连接 PhotoRobot 后,检查电力配电系统参数(如电压和频率)。作方法是使用控制单元背面的RJ45连接器。
重要: 如果控制单元的设置不合规,先设置好。作方法是找到控制单元背面的手动电压选择器,并通过RJ45连接器通过以太网线将控制单元连接到网络。

接下来,确保满足以下网络配置要求,以实现配备Arm V8的机器人转盘运行。
- 网络中的 DHCP 服务器是强制性的。
- 必须允许 TCP 端口 7777、7778 通信。
- 必须允许端口 6666 上的 UDP 广播。
- 互联网连接是强制性的。
- *.必须允许 photorobot.com 访问。
- 必须允许 as-unirobot.azurewebsites.net 访问。
- 建议将 PhotoRobot 有线连接到 LAN。
- 如有需要,请参考 PhotoRobot 网络的前提条件确认设置。
- 将电源插头连接到电源插座。
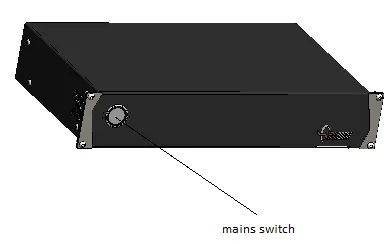
最后,按下控制单元的主电源开关。状态变化时,灯光会从闪烁变为稳定,表示控制单元准备工作。
2.1. 查找 PhotoRobot 在局域网中的 IP 地址
正确配置网络后,需要搜索并识别局域网上的 PhotoRobot IP 地址。为此,PhotoRobot Locator 应用程序直接集成在 CAPP 中,以便更轻松地搜索和识别网络上的控制单元。请确保您使用的是最新版本的 CAPP 以访问此功能。
然后,要在 CAPP 中直接识别网络上的机器人,请打开 CAPP 的本地版本,转到“设置”,然后点击机器人 / 控制单元。

“机器人 / 控制单元”菜单显示包含“名称”、“网络”、“单元”、“版本”、“已发现”和“识别”的列,对应每个机器人。如果机器人名称左侧的点是绿色,则表示它在线。单击机器人字段将打开机器人的网站界面。这还将使机器人控制单元上的 LED 灯闪烁绿色,以便于识别。
如果客户需要外部下载应用程序,PhotoRobot Locator 也可在 PhotoRobot 账户下载中提供 iOS 下载。

注意:Android 版的 PhotoRobot Locator 已停产。
此外,还有适用于 MacOS 或 Windows 的 FRFind 命令行实用程序,用于搜索网络并识别 PhotoRobot 控制单元。您也可以通过 PhotoRobot 账户下载页面找到下载 FRfind 的链接。
然后,在找到PhotoRobot设备后,复制IP地址,并以URL格式粘贴到任何浏览器中。如果成功,将启动服务图形界面,展示测试PhotoRobot的基本用户界面。
2.2. 机器人转盘与机械臂V8的基础测试
打开服务图形界面后,使用简单的用户界面控件先启动机器电机。接着,使用暂停按钮旁的左右箭头将平台转向任意角度,然后测试机械臂的移动。如果设备移动到所需角度,工作站即可恢复正常运行。

- 启动引擎(箭头1),尝试旋转(箭头2)。
- 如果机器人遵循动作指令,您的PhotoRobot设备即可正常运行。
3. PhotoRobot _Controls 软件概述
通过软件PhotoRobot _Controls,对配备机械臂V8扩展工作站的机器人转盘(包括所有机器人、摄像头和灯光)进行远程控制。该软件管理工作流程,提供所有必要的功能,以实现后期处理的有效自动化。

重要提示:PhotoRobot _Controls不包含在机器配送中;它需单独购买,并通过您的PhotoRobot账户获取。
有关安装和使用 PhotoRobot 控制应用软件的详细说明和支持,请参阅《PhotoRobot 入门用户手册》。
4. 信息标签
4.1. 符号概述

4.2. 机器与组件标签
关于特定机器和组件的信息标签,请参阅PhotoRobot安全信息与说明中的“信息标签”(3.1.)部分。


EOS Rebel 系列


EOS DSLR 系列


EOS M 微 单镜系列


PowerShot 系列


特写/ 手持

佳能 EOS Rebel 系列提供适合初学者的 DSLR 相机,具有稳定的图像质量、直观的控制和多功能功能。这些相机是摄影爱好者的理想选择,提供可靠的自动对焦、可变角度触摸屏以及全高清或 4K 视频录制。
连接
分辨率 (MP)
分辨率
佳能 EOS DSLR 系列提供高质量的图像、快速的自动对焦和多功能性,使其成为摄影和视频制作的理想选择。
连接
分辨率 (MP)
分辨率
佳能 EOS M 微单镜系列将紧凑的设计与类似 DSLR 的性能相结合。这些相机具有可更换镜头、快速自动对焦和高质量图像传感器,非常适合在不牺牲图像质量的情况下寻求便携性的旅行者和内容创作者。
连接
分辨率 (MP)
分辨率
佳能 PowerShot 系列为休闲拍摄者和爱好者提供紧凑、用户友好的相机。从简单的傻瓜相机到高级变焦相机,它们提供便利性、稳定的图像质量以及图像稳定和 4K 视频等功能。
连接
分辨率 (MP)
分辨率


