PhotoRobot 激光定心和对准指南
本用户支持手册提供了有关如何对齐和居中 PhotoRobot 内置十字激光系统的技术说明。请按照以下步骤使用两个激光器找到任何圆形 PhotoRobot 板的中点。说明包括如何将激光器物理移动到工作台的中心、初始激光设置以及如何微调激光定位。此外,在手册的末尾,还有有关对 C1300 转盘的特殊激光系统进行对准和居中的说明(以前以 Case 1300 的名称分发)。
重要:在进行任何自行安装或维修之前,除了设备专门提供的手册外,请务必先参阅 PhotoRobot 安全信息和说明。
注意:有关网络配置和网络要求的详细信息,请参阅 PhotoRobot 首次使用和基本测试。
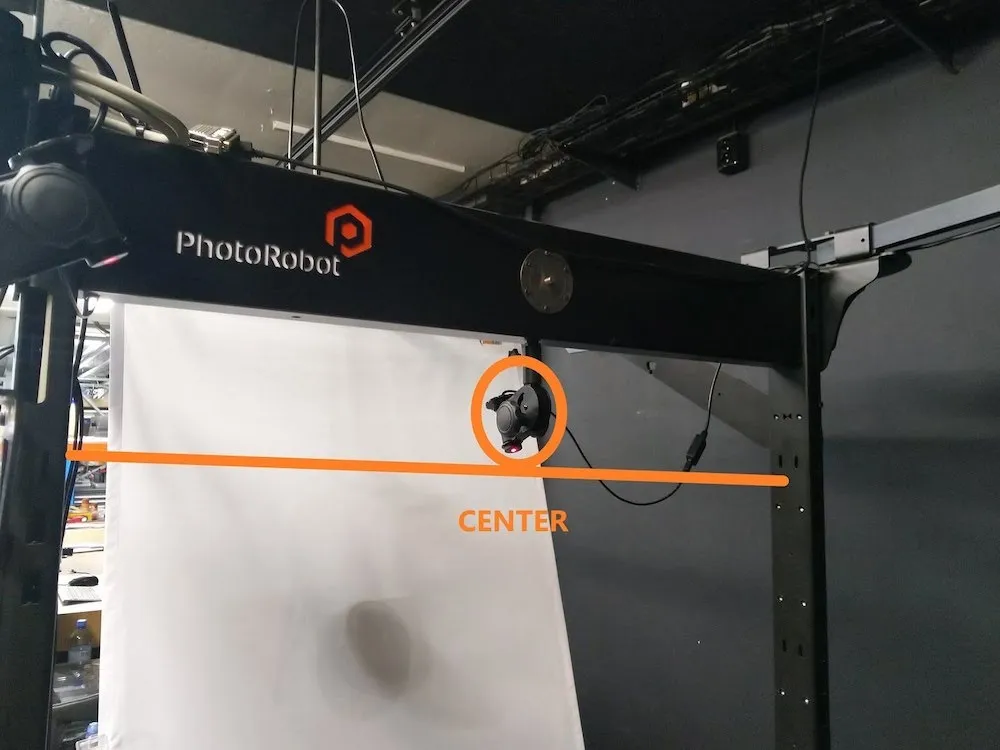
1. 将激光器物理移动到桌子中央
1.1. 在开始之前,请在 PhotoRobot 和本地网络之间建立连接。接下来,打开控制单元(第 6 代)和激光盒的电源。
注意: 要对齐 C1300 转盘的激光系统并居中,另请参阅本用户手册第 4 节中的特殊说明。
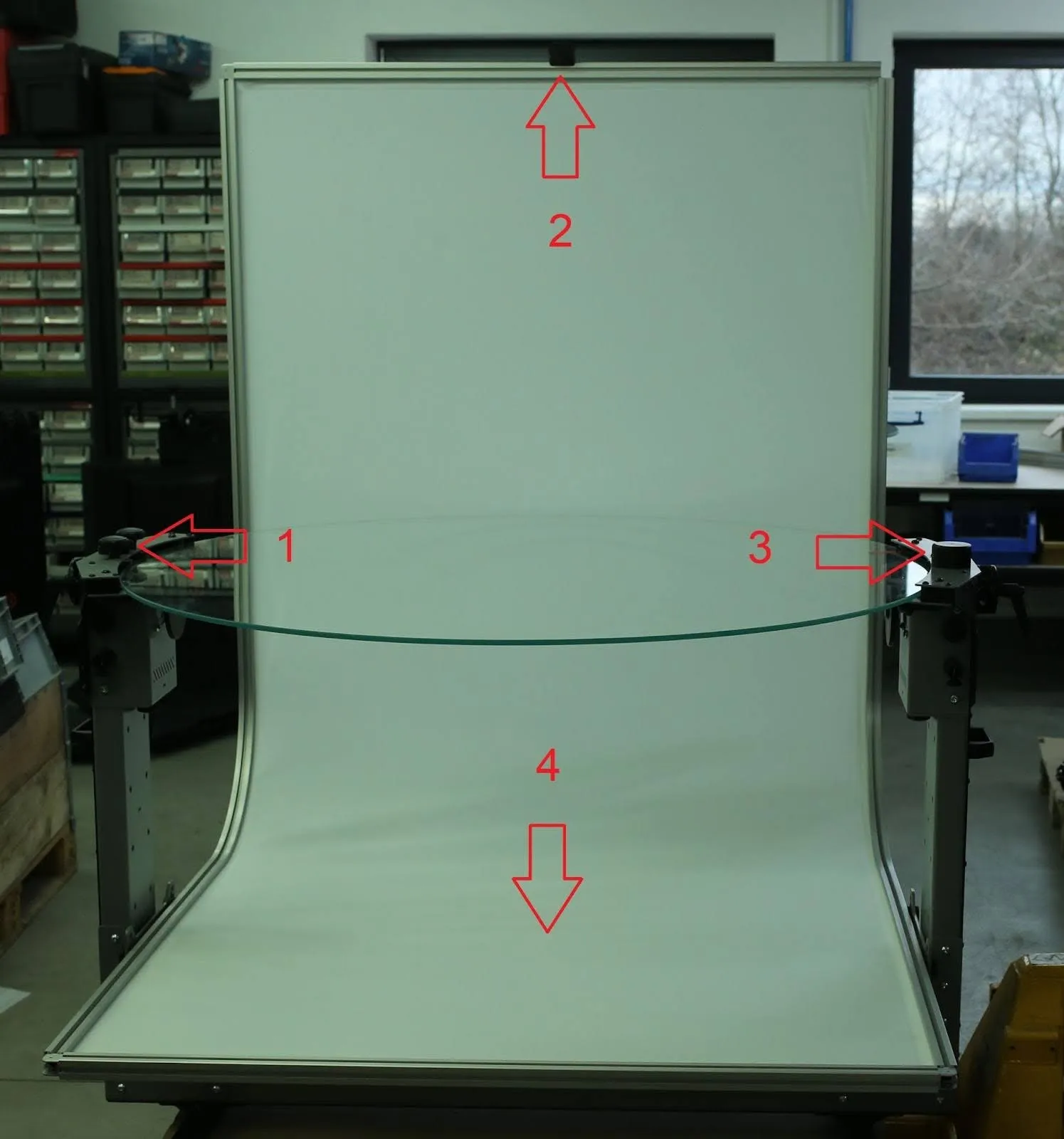
1.2. 将 PhotoRobot 连接到网络并打开控制单元和激光盒电源后,测量安装激光的工作台两侧之间的距离。然后,用手将激光器转动或移动到中心,并将激光器固定到位。
2. 估计粗略设置
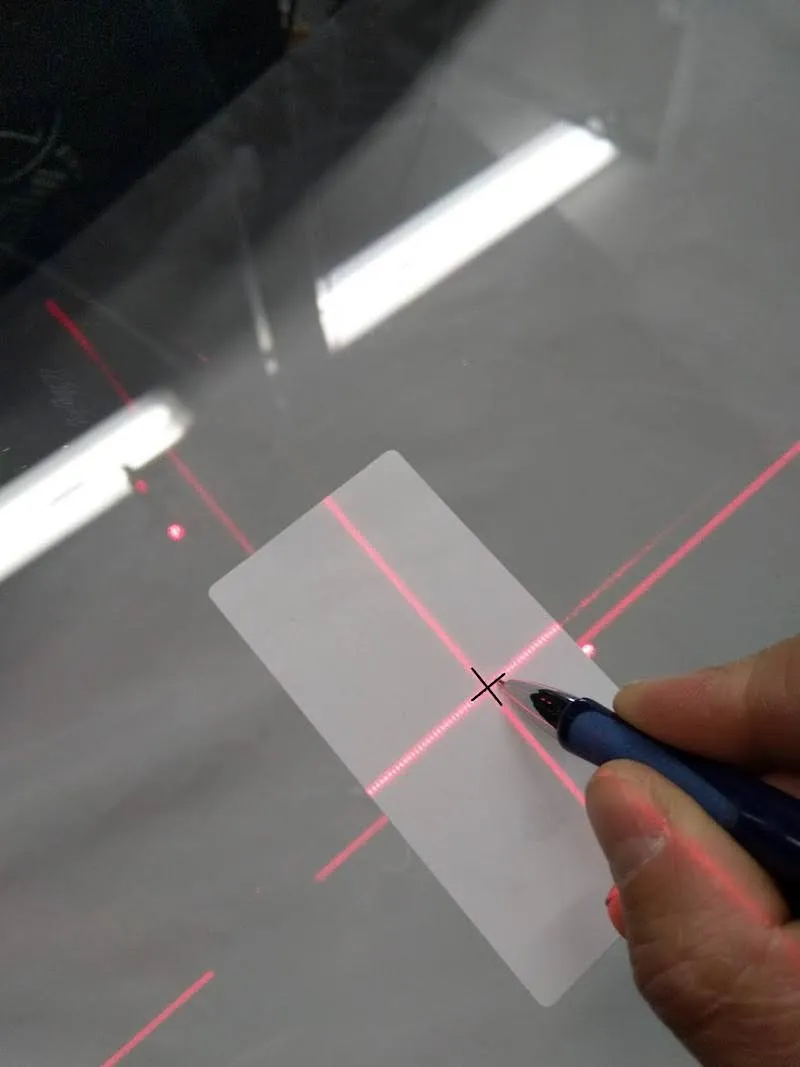
2.1. 当激光固定到位后,将贴纸贴在转盘板上玻璃的大致中点处。激光将在贴纸上变得更加明显,有助于更好地估计板的中心点。
2.2. 用手调整两个激光器以对齐在估计大致中点的贴纸上。
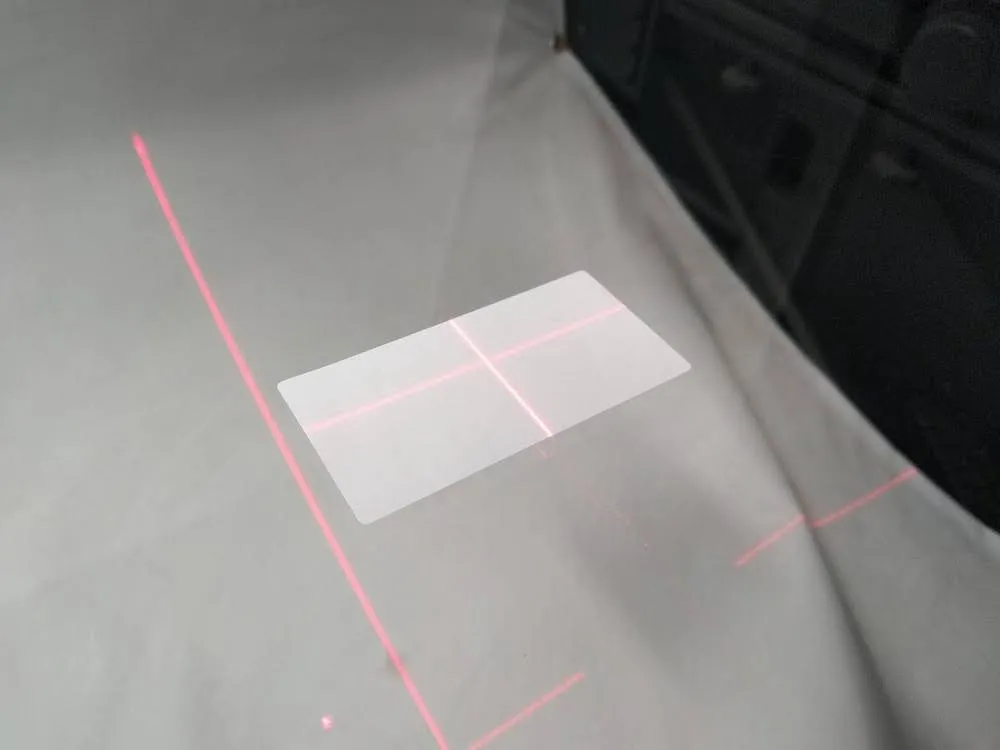
3. 微调激光对准
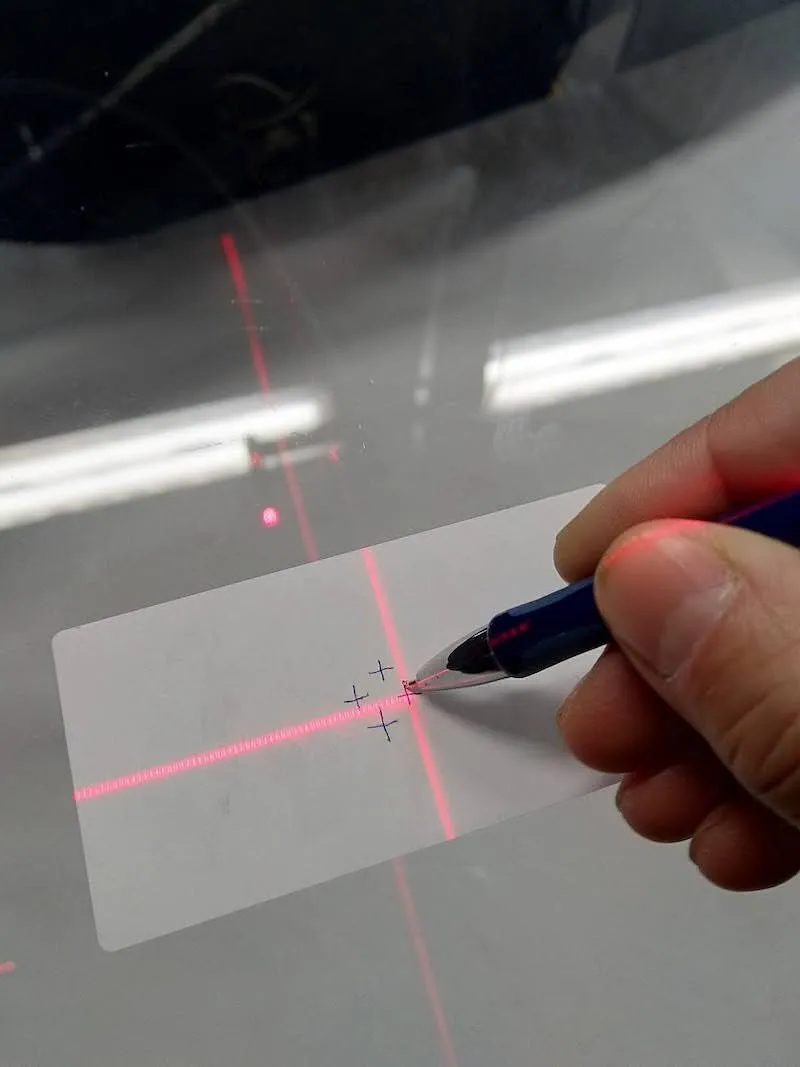
3.1. 在贴纸上画一个小十字,复制激光的红十字。
3.2. 接下来,在手机上启动定位器应用程序,找到分配给机器人的控制单元,然后访问服务 GUI。注意:有关网络的详细说明,请参阅 PhotoRobot 详细网络先决条件(第 8 节:附录信息)。然后,找到分配给机器人的控制单元,并访问其 GUI。

3.3. 在服务 GUI 中,使用转动控件将玻璃旋转 90 度,然后再次将十字激光的位置追踪到贴纸上。重复此步骤两次:将玻璃旋转 90 度,追踪激光十字,旋转 90 度,最后一次追踪激光十字。
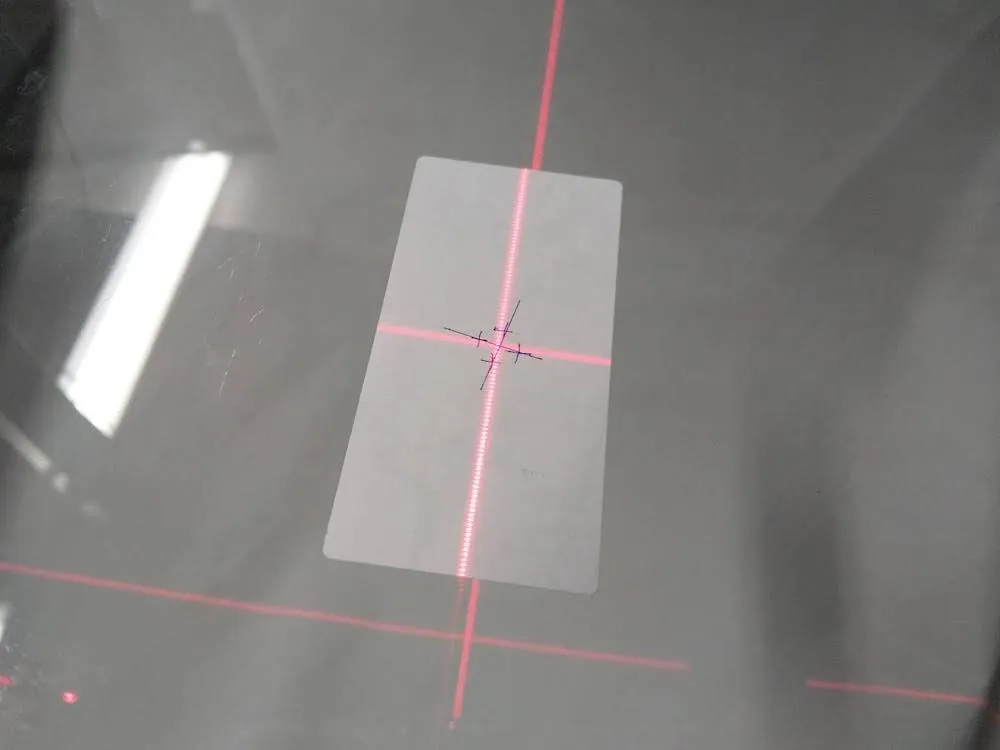
3.4. 描出贴纸上的四个十字后,用直线连接每个相对的十字。各个十字之间的合成交叉将代表玻璃板的实际中点。
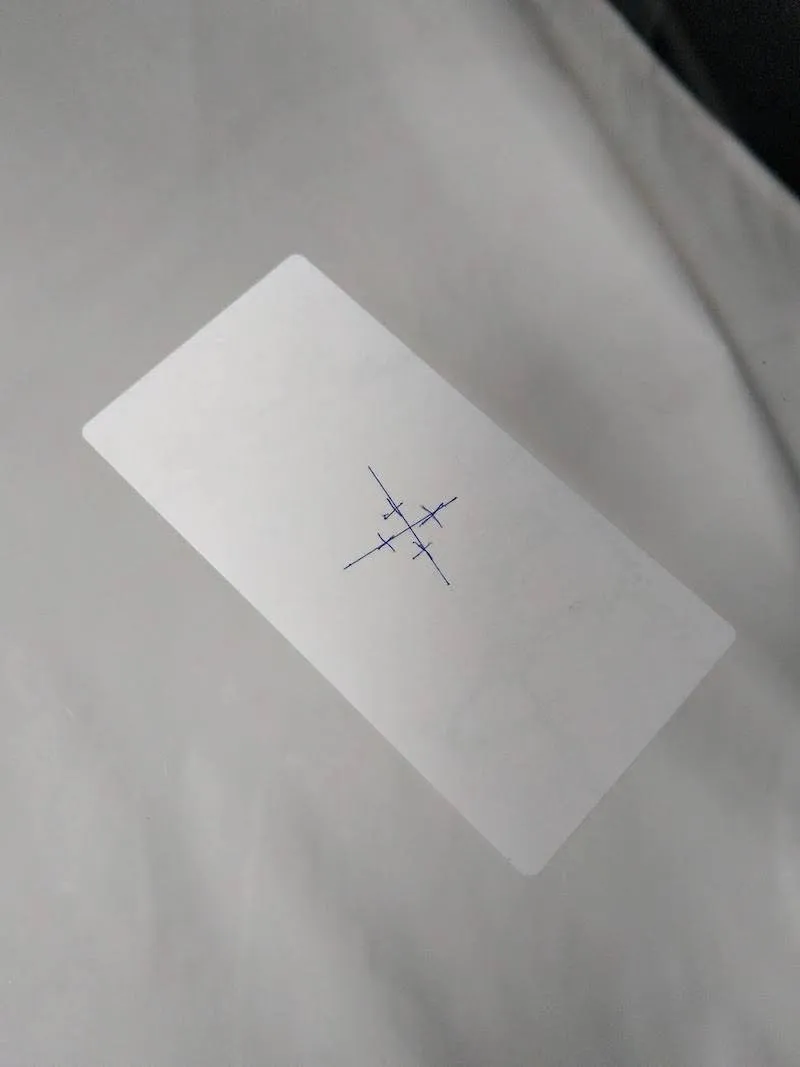
3.5. 最后,将两个激光器调整到确定的中点。激光系统现在将居中并对齐到板旋转的绝对中心。
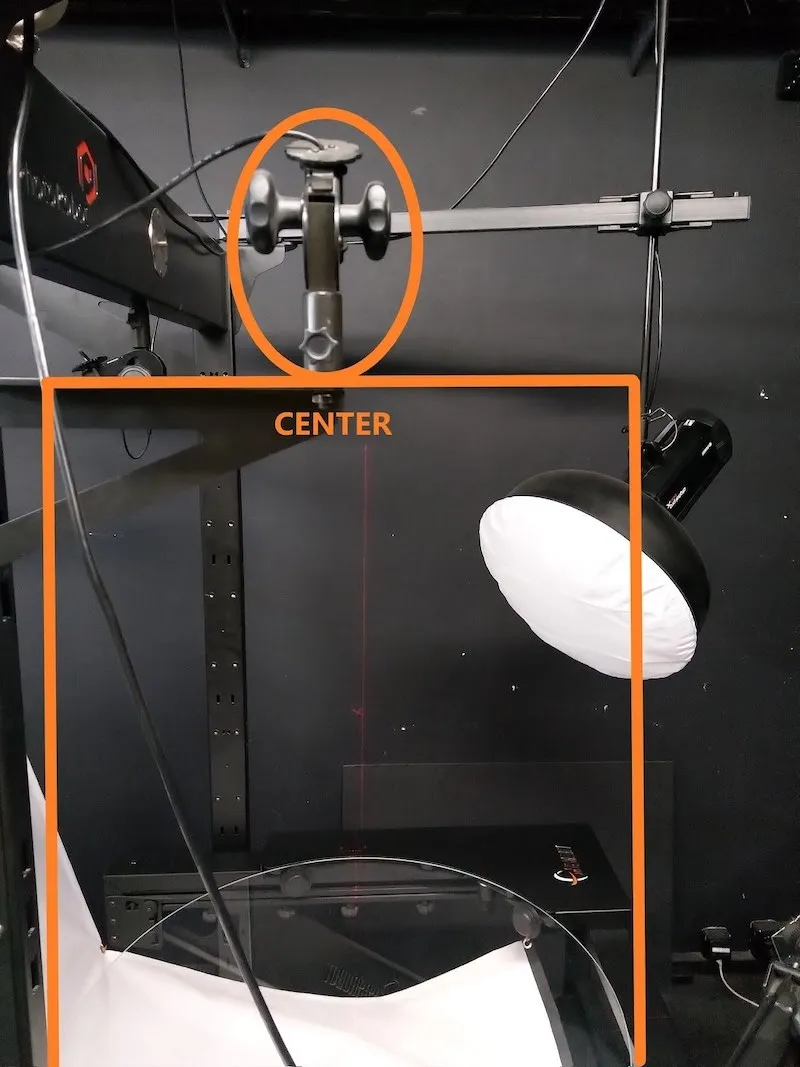
4. C1300 特种激光器对准和定心
4.1. 在 C1300 机器人上对准和居中激光器时,请注意专用激光系统。与其他 PhotoRobot 相比,C1300 激光系统有几个不同之处。虽然物理原理相同,但 C1300 激光系统的结构采用安装四个激光器。
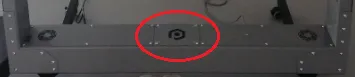
4.2. 在这个系统中,Laser 4 是 C1300 机器人骨架的组成部分。激光 4 是十字激光,它从底部透过白色背景照射。要调整激光位置,请找到四个银色螺钉以露出容纳激光器的中央方形部分。
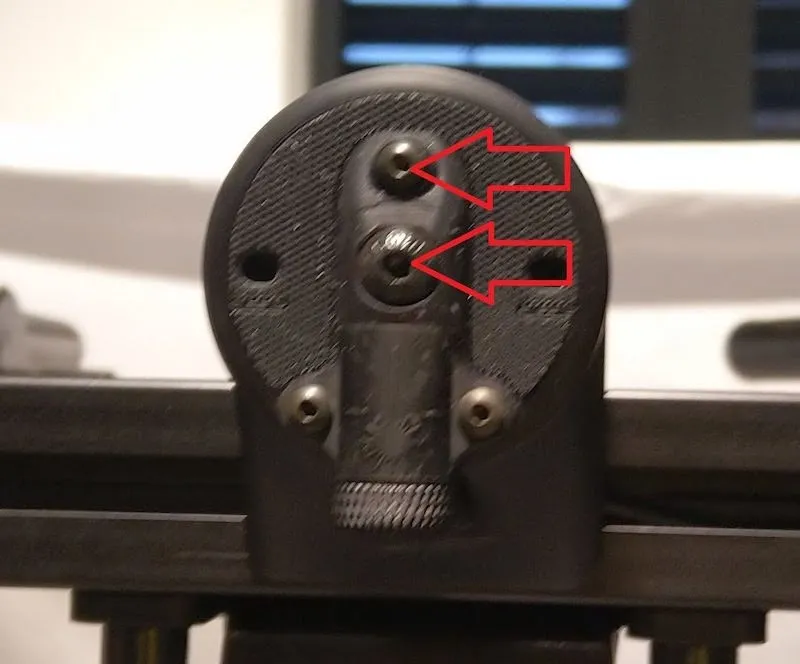
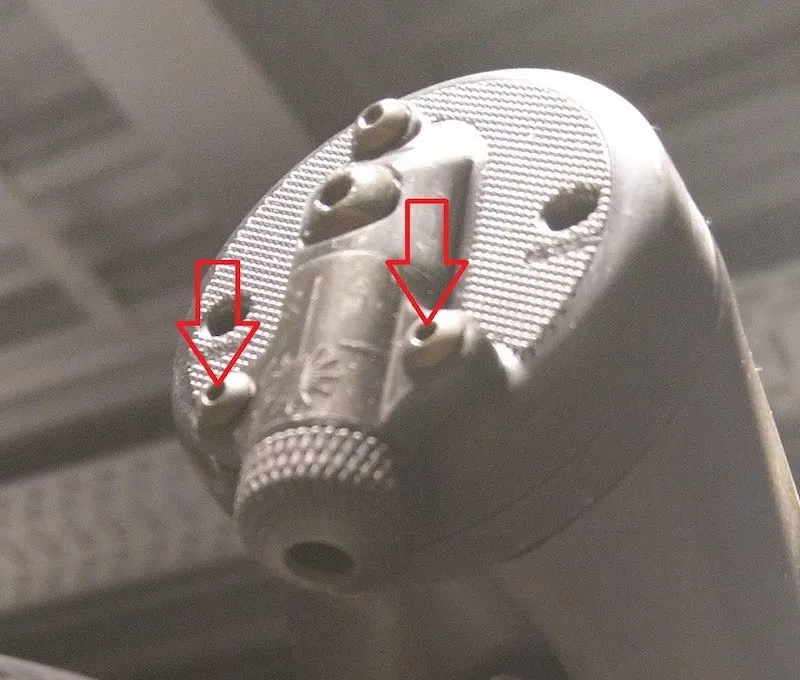
4.3. 打开激光器外壳的中央方形部分后 4,使用固定塑料激光器外壳的两个螺钉手动调整其位置。
注意:激光 1、激光 2 和激光 3 的结构都与激光 4 相同。它们也是线激光器:



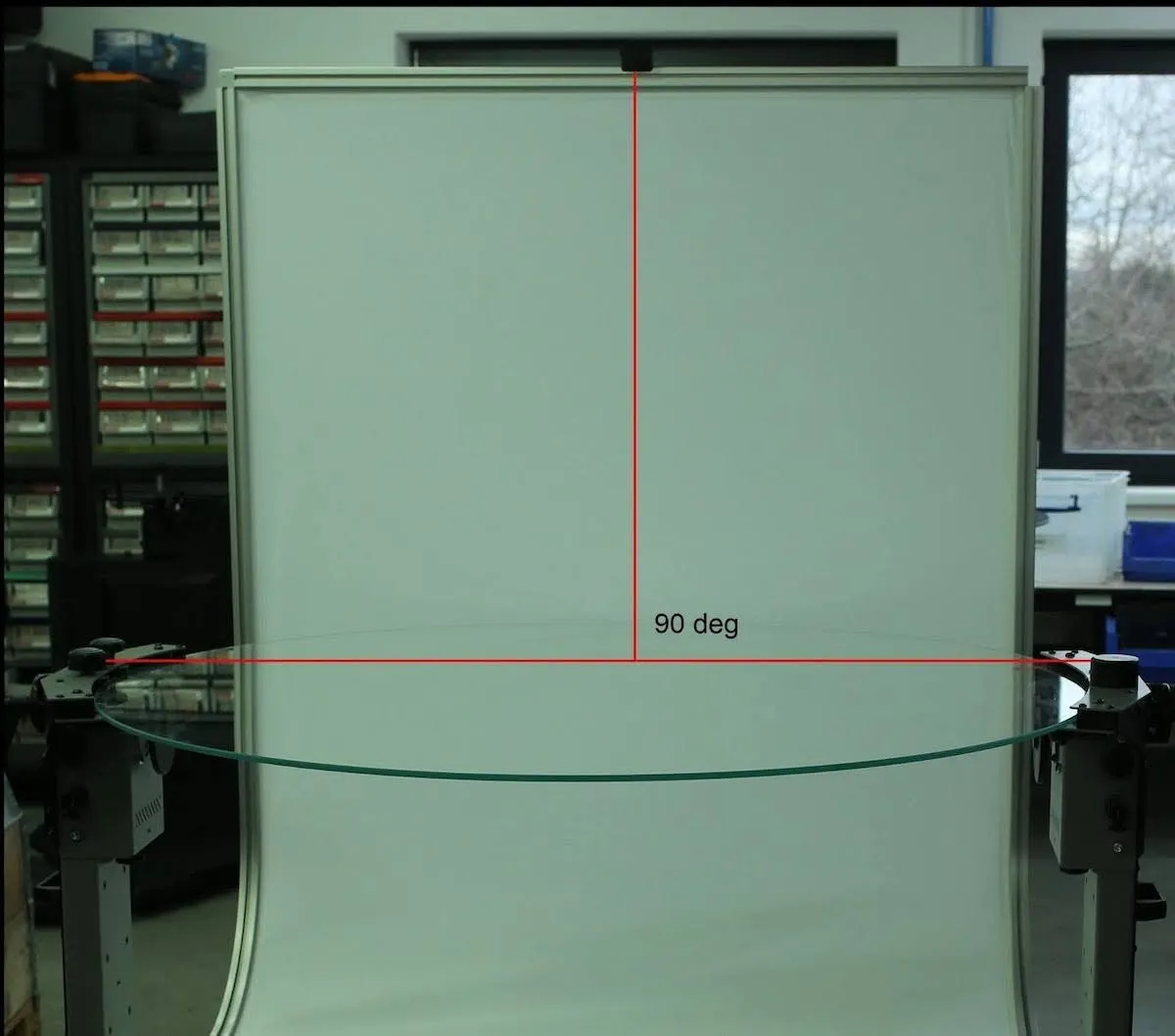
4.4. 最后,在对准和定心激光器时,确保激光线与顶部激光器与玻璃板之间有 90 度角。


EOS Rebel 系列


EOS DSLR 系列


EOS M 微 单镜系列


PowerShot 系列


特写/ 手持

佳能 EOS Rebel 系列提供适合初学者的 DSLR 相机,具有稳定的图像质量、直观的控制和多功能功能。这些相机是摄影爱好者的理想选择,提供可靠的自动对焦、可变角度触摸屏以及全高清或 4K 视频录制。
连接
分辨率 (MP)
分辨率
佳能 EOS DSLR 系列提供高质量的图像、快速的自动对焦和多功能性,使其成为摄影和视频制作的理想选择。
连接
分辨率 (MP)
分辨率
佳能 EOS M 微单镜系列将紧凑的设计与类似 DSLR 的性能相结合。这些相机具有可更换镜头、快速自动对焦和高质量图像传感器,非常适合在不牺牲图像质量的情况下寻求便携性的旅行者和内容创作者。
连接
分辨率 (MP)
分辨率
佳能 PowerShot 系列为休闲拍摄者和爱好者提供紧凑、用户友好的相机。从简单的傻瓜相机到高级变焦相机,它们提供便利性、稳定的图像质量以及图像稳定和 4K 视频等功能。
连接
分辨率 (MP)
分辨率


