PhotoRobot Cube V5 / V6 / 紧凑型用户手册
本用户手册提供了有关 PhotoRobot Cube V5 / V6 / Compact 的安装、连接和使用的技术说明。它包括有关如何将 Cube 机器人安装为旋转人体模型躯干支架的说明。该手册旨在为 PhotoRobot 客户在设备组装、首次使用以及入职生产线操作员期间提供支持。

注意:PhotoRobot 设备的首次安装必须始终由授权的 PhotoRobot 机构执行。有权安装 PhotoRobot 的当局是经批准的分销商或制造商本身的代表。
重要提示: 在自行安装或首次使用之前,除了设备专门提供的手册外,请务必先参阅 PhotoRobot 安全信息和说明。
Cube V5 / V6 / 紧凑型首次使用和安装
感谢并祝贺您购买 PhotoRobot Cube!您的设备代表了数十年来在自动摄影领域的专业经验、专业知识和创新。每个机器人的设计都以您为中心。同时,该软件正在不断开发中——根据独特的需求进行定制,同时每次更新都使整个 PhotoRobot 生态系统受益。
欢迎来到 PhotoRobot。使用 Cube V5 / V6 / Compact PhotoRobots 上的此技术文档来熟悉该技术,并获取详细说明组装和首次使用该解决方案的说明。
1. 产品描述 - Cube V5 / V6 / Compact
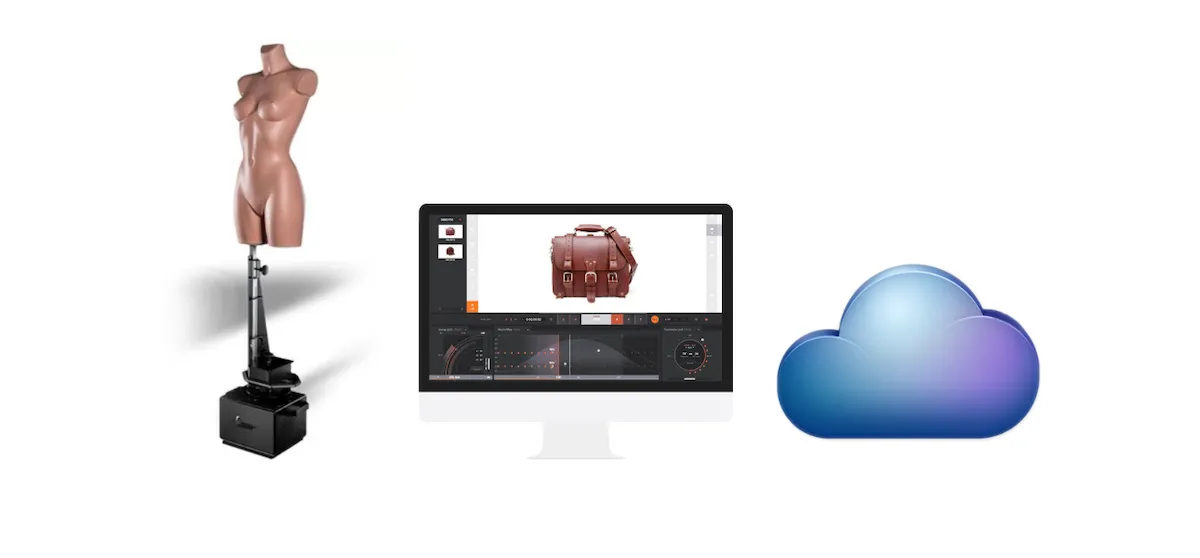
PhotoRobot Cube V5 / V6 / 紧凑型设备是最通用的照相馆机器人之一。每个立方体都能够独立运行或与其他 PhotoRobot 组合运行,并具有 3 种不同作模式的配置。Cube 可用作旋转摄影平台、物体悬挂模式以及旋转人体模型躯干支架。

PhotoRobot Cube 的主要特点包括:
- 单独使用或与兼容的 PhotoRobot 结合使用
- 快速设置为 360 度转盘或物体悬挂模式
- 支持人体模型躯干支架或旋转平台
- 兼容不同类型和尺寸的摄影人体模型
- 提供 Cube V5、V6 和 Compact 版本,具有更大的多功能性
1.1. 设备概述 - Cube V5 / V6 / Compact
PhotoRobot 的 Cube V5、 Cube V6 和 Cube Compact 以三种不同的配置运行。标准配置包括将设备用作旋转摄影平台,或将物体悬挂在空中进行拍照。或者,可以将设备设置为旋转支架以安装人体模型躯干。
a) 360度全景/旋转平台设置:

b) 360 度/旋转悬挂模式:

c) 旋转人体模型躯干支架:

注意: Cube V5 和 Cube V6 的控制单元是设备独立但不可或缺的组件。Cube Compact 在机器内有一个集成的控制单元。
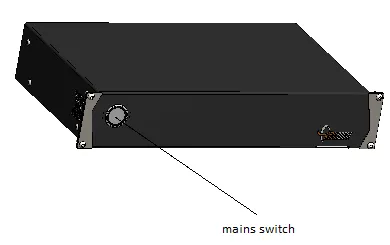
- 上图显示了 Cube V5 / Cube V6 的控制单元。
1.2. Cube Compact 技术参数
Cube Compact 有以下技术参数。
- 重量: 26.21公斤
- 尺寸: 337.5 x 373.5 x 209.5 毫米
- 电源: 100 - 230 V,50 HZ,保险丝 T1.6 A (230 V)、T3.15 A (115 V)
- 负载能力: 底部和顶部安装均为 130 公斤
- 输出轴扭矩: 143.5 Nm
- 速度: 0 -17 1.min-1
1.3. Cube 紧凑型配件
Cube Compact 具有以下零件和配件。
a) 衣架:

b) 底部底座:

c) 顶部底座:
d) 机脚:

e) 板:

f) 门户:

1.4. Cube Compact 安装和使用概述
除了 Cube Compact 配件外,Cube Compact 还有多种安装和使用配置。其中包括以下配置部件和设置。
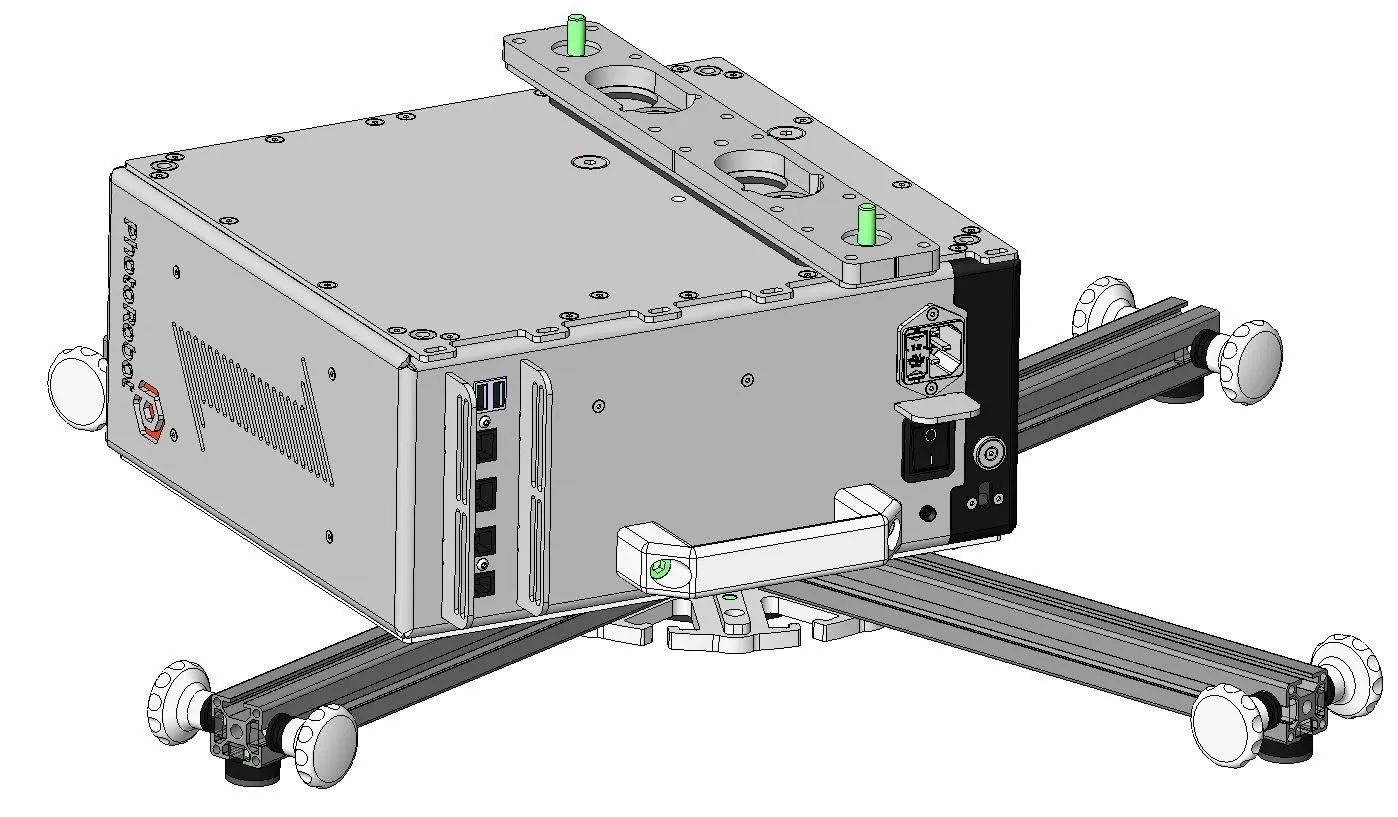
a) 底部紧固板 (用于固定设备转盘或安装系统):
b) 紧固的独立旋转平台 (固定在地板上以提高稳定性):


注意: 在这种配置中,有一个 95 厘米的板,底座安装在稳定的地板表面上。这在使用时可以稳定机器,防止翻倒。其用例包括展示中小型物体,最大尺寸为 60 - 65 厘米。
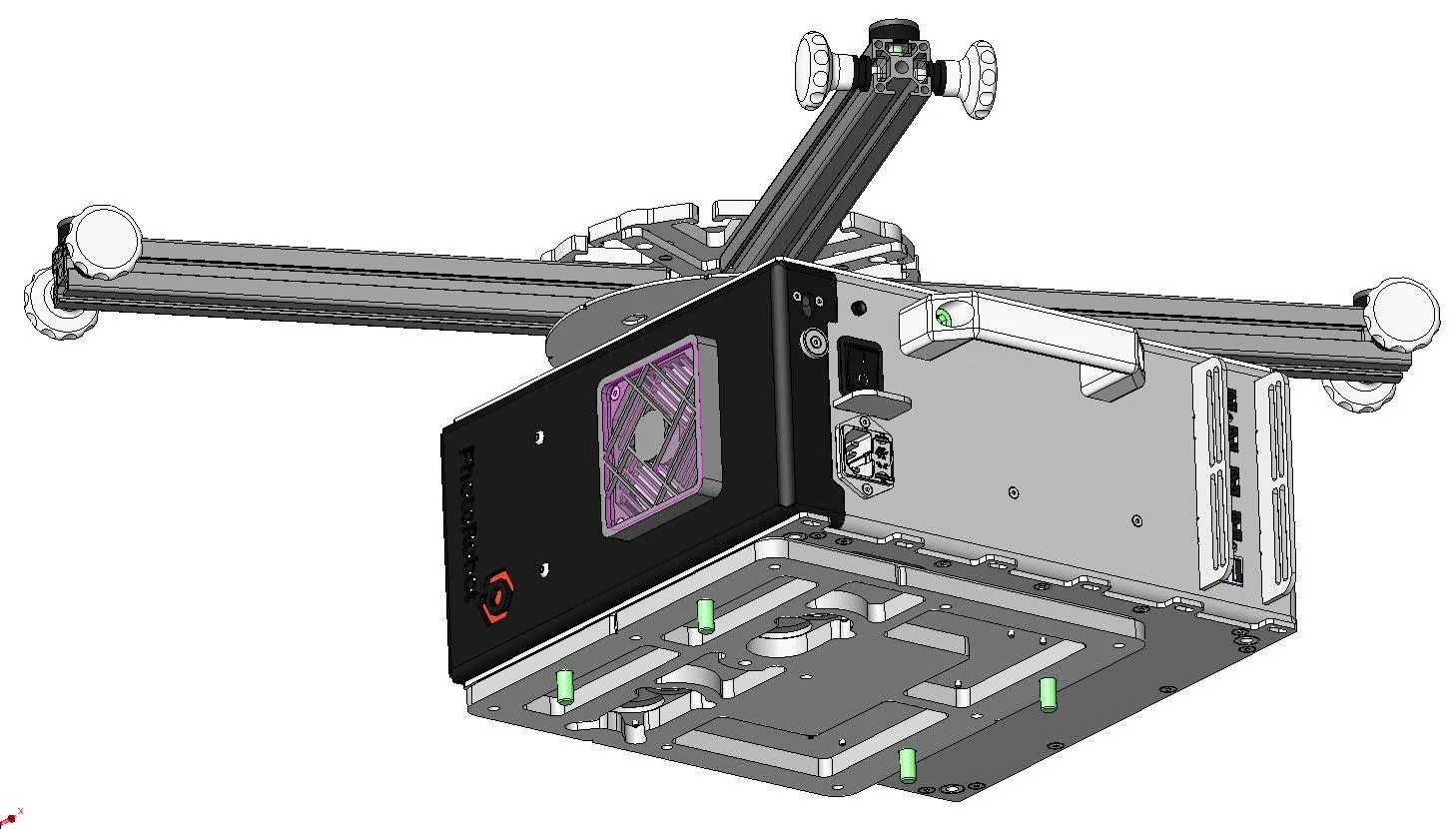
c) 独立式旋转平台 (使用设备脚):
d) 360 度旋转悬挂模式 (倒置安装到顶部入口):




1.5. 立方体紧凑型紧急停止
要执行紧急停止,请从插座上拔出电源线,断开设备与电网的连接。
1.6. Cube V5 / V6 / 紧凑维护
请注意,有必要保持设备清洁并处于干燥、气候受控且温度恒定的环境中。只能用广告清除灰尘amp 布,不要使用化学品或溶剂进行任何清洁。
根据设计,设备必须根据当地法律进行定期检查和修订。在其生命周期结束后,必须通过移交给当地立法规定的电子废物收集系统来妥善处理电气设备。
2. 首次使用 - PhotoRobot Cube V5 / V6 / 紧凑型
在首次使用 PhotoRobot 之前,有必要了解该技术背后的概念。PhotoRobot 是一款革命性的一体化解决方案,用于产品和物体摄影的自动化。从技术角度来看,它是一个由硬件和软件组成的模块化单元。因此,PhotoRobot 本身必须与运行它的计算机通过同一网络连接。网络还必须连接到互联网才能访问在云中运行的 PhotoRobot 服务。然后必须始终满足以下要求。
- 必须有一个连接到本地网络的 PhotoRobot 控制单元。
- 运行服务 GUI 或操作员称为 _Controls 的软件需要计算机。
- 计算机必须与 PhotoRobot 控制单元连接到同一网络。
- 网络必须连接到互联网。
确保 PhotoRobot 连接到计算机和本地网络后,检查配电系统参数(例如电压和频率)。
然后,检查控制单元电源设置。它必须符合所有配电系统参数。如果控制单元的设置不符合要求,请参阅下一节关于控制单元电源设置。
如果合规,请继续通过以太网电缆将控制单元连接到网络。
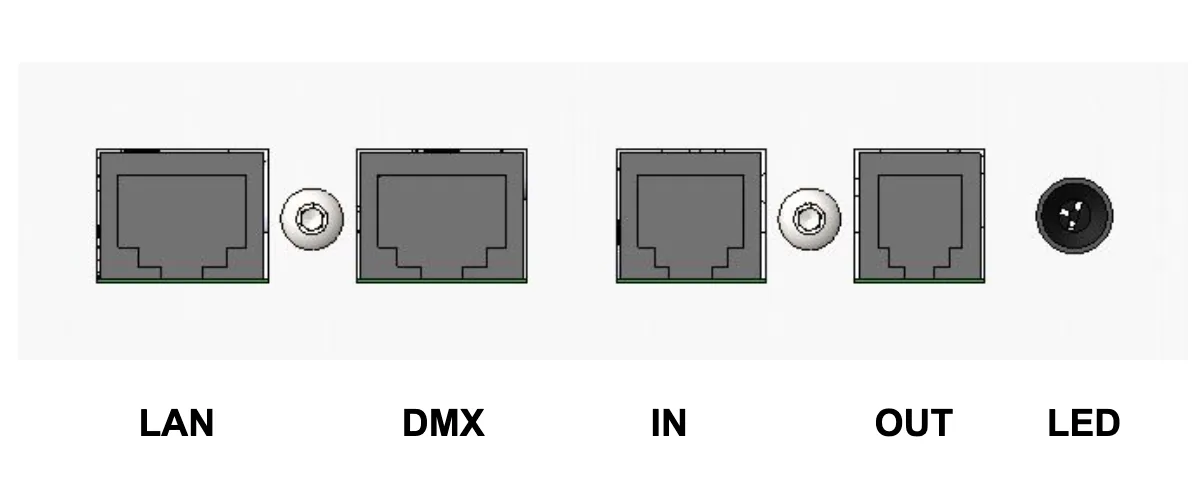
注意:对于 Cube V5 / V6 型号,控制单元是一个单独的设备。找到控制单元背面的 RJ45 连接器。Cube Compact 将控制单元集成到机器中。找到 Cube 机器人背面的 RJ45 连接器。
2.1. 控制单元电源设置
要检查控制单元电源设置,旧型号的控制单元在设备背面有一个手动电压选择器。

或者,较新型号的控制单元没有电压选择器,其工作范围为 110V - 240V。
如果不确定控制单元电源设置,请联系 PhotoRobot 技术支持,寻求专业 PhotoRobot 技术人员的帮助。
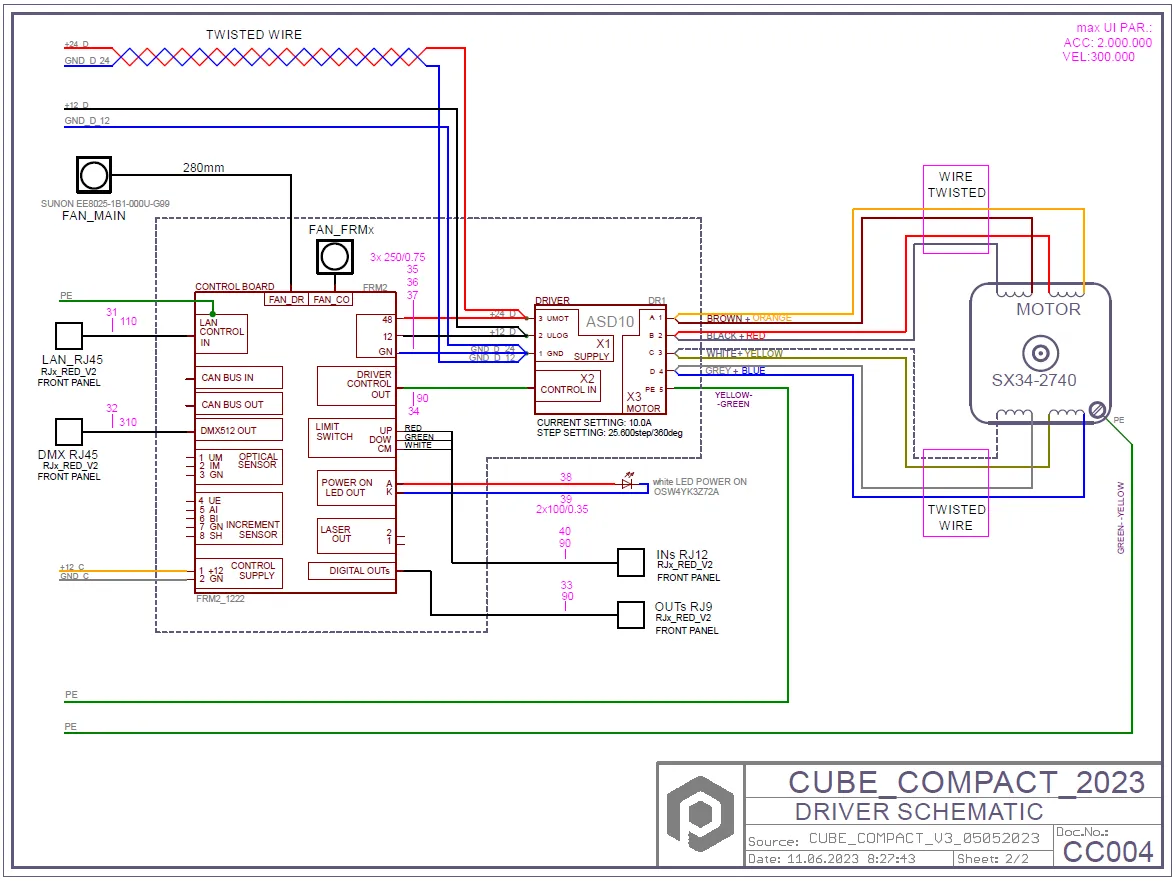
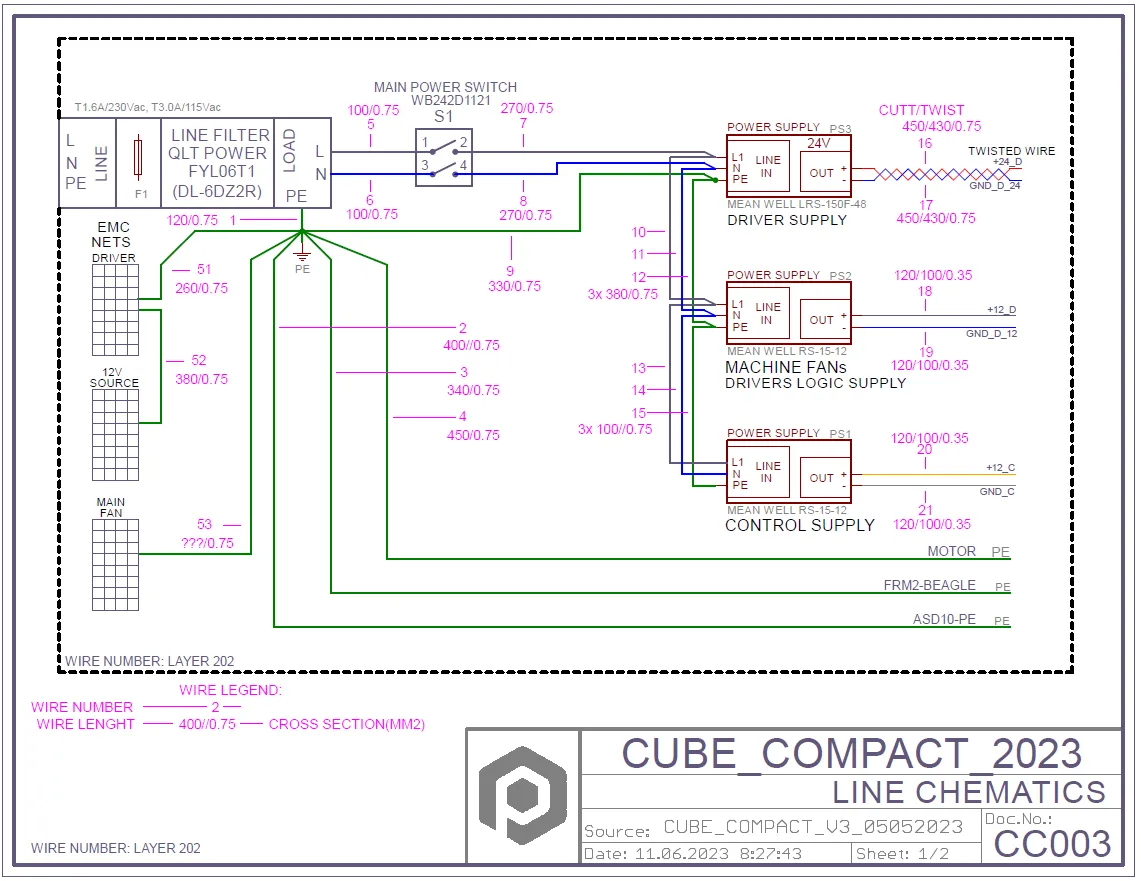
2.2. 立方体紧凑电气图
2.3. 网络配置
要配置网络以与 PhotoRobot 正确通信,网络上必须满足以下要求。
- 网络中的 DHCP 服务器是强制性的。
- 必须允许 TCP 端口 7777、7778 通信。
- 必须允许端口 6666 上的 UDP 广播
- 互联网连接是强制性的。
- *.必须允许 photorobot.com 访问。
- 必须允许 as-unirobot.azurewebsites.net 访问。
- 建议将 PhotoRobot 有线连接到 LAN。
- 如有必要,请参阅 PhotoRobot 详细网络先决条件 了解更多信息。
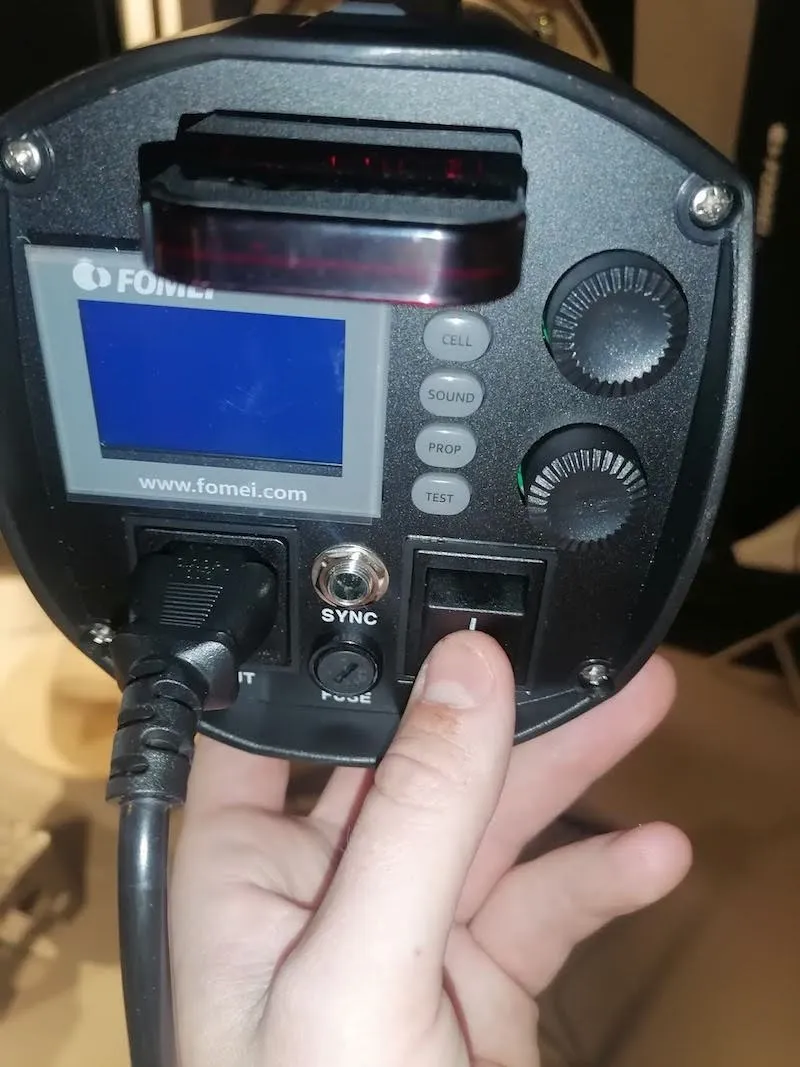
- 将电源插头连接到电源插座。
接下来,按下 Cube V5 / V6 控制单元(或 Cube Compact 背面)上的电源开关。状态灯将从闪烁变为持续亮,以便在准备运行时发出信号。
2.4. 在局域网上查找 PhotoRobot 的 IP 地址
正确配置网络后,需要搜索并识别 PhotoRobot 在 LAN 上的 IP 地址。为此,PhotoRobot Locator 应用程序直接集成在 CAPP 中,以便更轻松地搜索和识别网络上的控制单元。请确保您使用的是最新版本的 CAPP 来访问此功能。
然后,要在 CAPP 中直接识别网络上的机器人,请打开 CAPP 的本地版本,转到“设置”,然后点击机器人 / 控制单元。

“机器人 / 控制单元”菜单显示包含“名称”、“网络”、“单元”、“版本”、“已发现”和“识别”的列,对应每个机器人。如果机器人名称左侧的点是绿色,则表示它在线。单击机器人字段将打开机器人的网站界面。这还将使机器人控制单元上的 LED 灯闪烁绿色,以便于识别。
如果客户需要外部下载应用程序,PhotoRobot Locator 也可在 PhotoRobot 账户下载中提供 iOS 下载。

注意:Android 版的 PhotoRobot Locator 已停产。
此外,还有适用于 MacOS 或 Windows 的 FRFind 命令行实用程序,用于搜索网络并识别 PhotoRobot 控制单元。FRfind 的下载链接也可在 PhotoRobot 账户下载页面找到。
2.5. 基本测试 - Cube V5 / V6 / Compact
要测试 Cube V5 / V6 / Compact,接下来打开一个 web 浏览器并以 URL 格式输入与您的 PhotoRobot 关联的 IP 地址。例如,输入:https://11.22.33.44(但请注意,此地址只是一个示例)。如果成功,将启动一个基本用户界面。

- 打开发动机(上面的箭头 1),并尝试作机器人的任何可移动部件(上面的箭头 2)。如果机器人根据您的指示移动,您就可以定期使用 PhotoRobot 设备了。
3. Cube V5 / V6 组件和人体模型躯干支架
组装 Cube V5 或 Cube V6 型号时,请注意需要组装单独的控制单元和机架。Cube Compact 的情况并非如此。如果使用 Cube Compact,请继续执行有关组装纸张背景的部分。
3.1. HD机架和控制单元(V5 / V6)的组装
3.1.1. 要组装 Cube V5 和 Cube V6 的单独控制单元,请从组装机架开始。为此,请按照交付时货架盒上随附的手册中的说明进行作。

3.1.2. 接下来,从纸箱运输箱中找到并打开控制单元的包装。

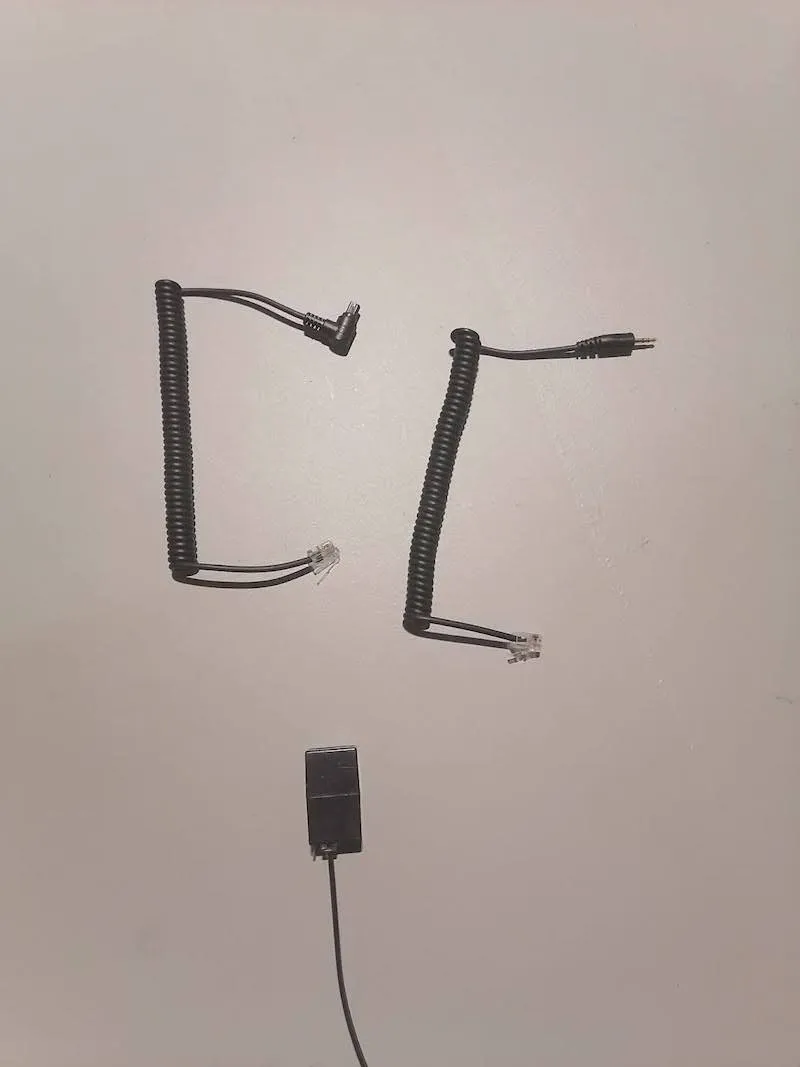
3.1.3. 然后,准备以下电缆: 电源线 (1 米长)、 快门电缆、 电机电缆和 以太网电缆 (2 米长)。
a) 电源线 (1米长):

b) 快门电缆 (1 米长):

c) 电机电缆:

d) 以太网电缆 (2 米长):
3.1.4. 将上一步准备好的每根电缆放入机架中。
3.1.5. 将前面步骤中的电缆连接到控制单元。

重要: 必须使用连接器上的两个螺钉紧固电机电缆。快门电缆连接到控制单元的 OUT 端口。
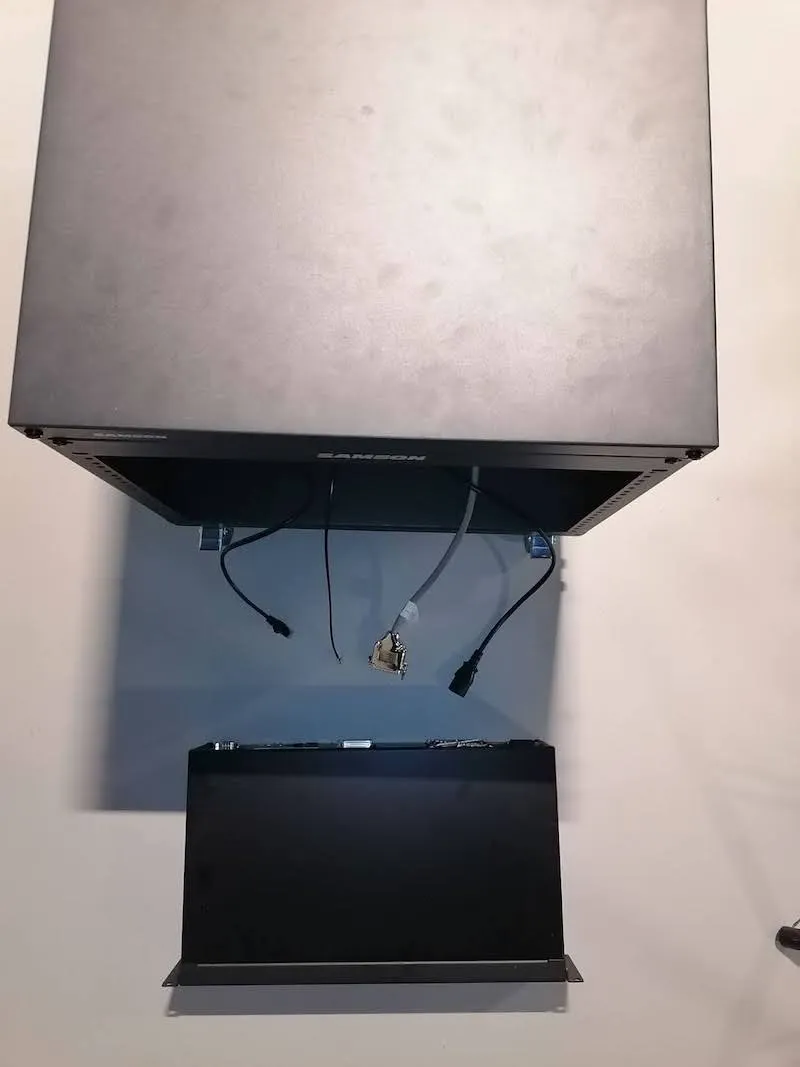
3.1.6. 将控制单元插入机架外壳,并拧紧螺钉以将其密封。
3.2. 配件和连接件的组装
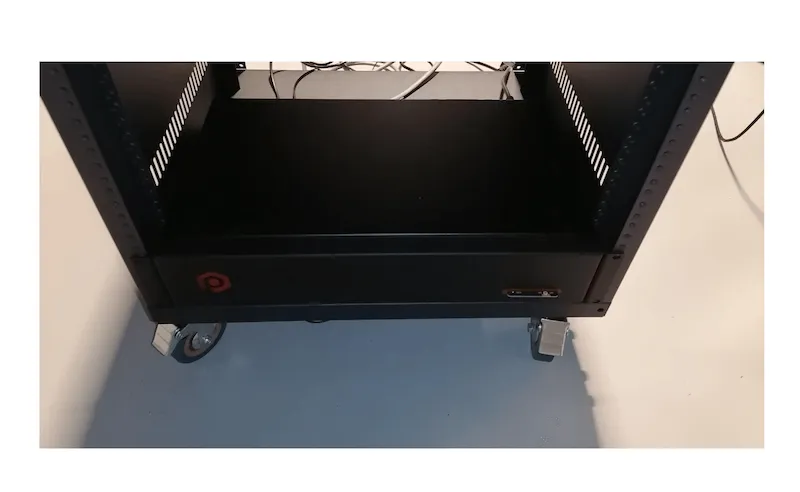
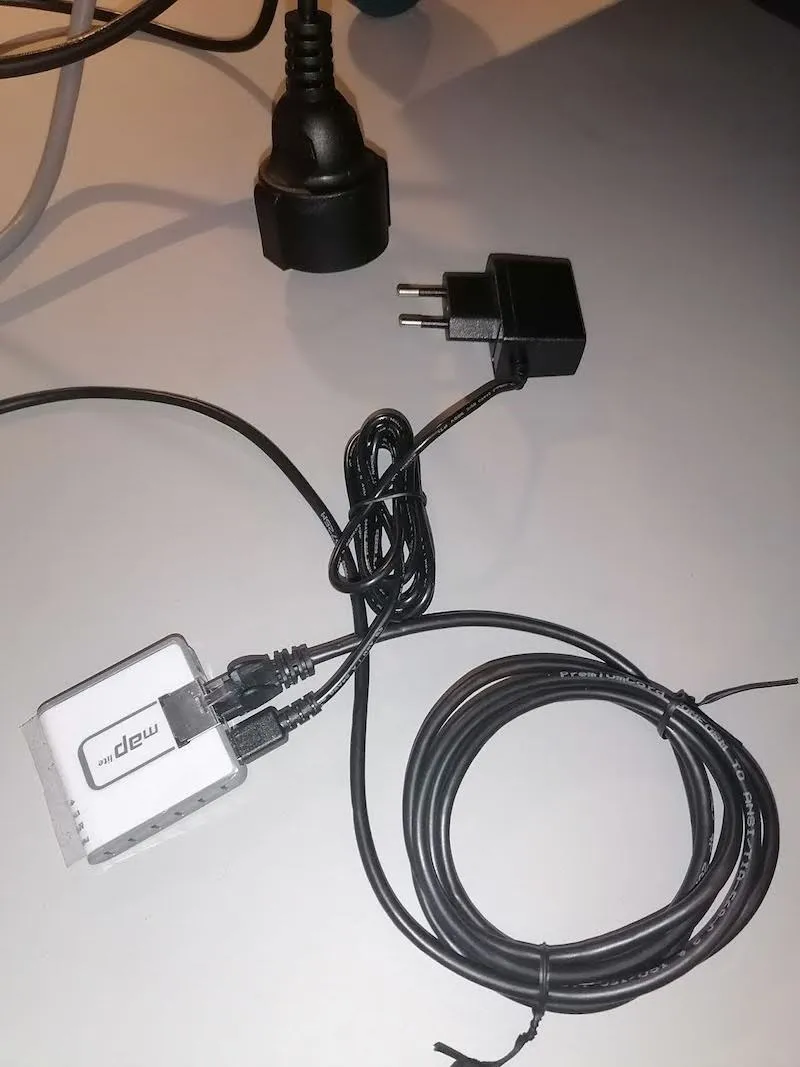
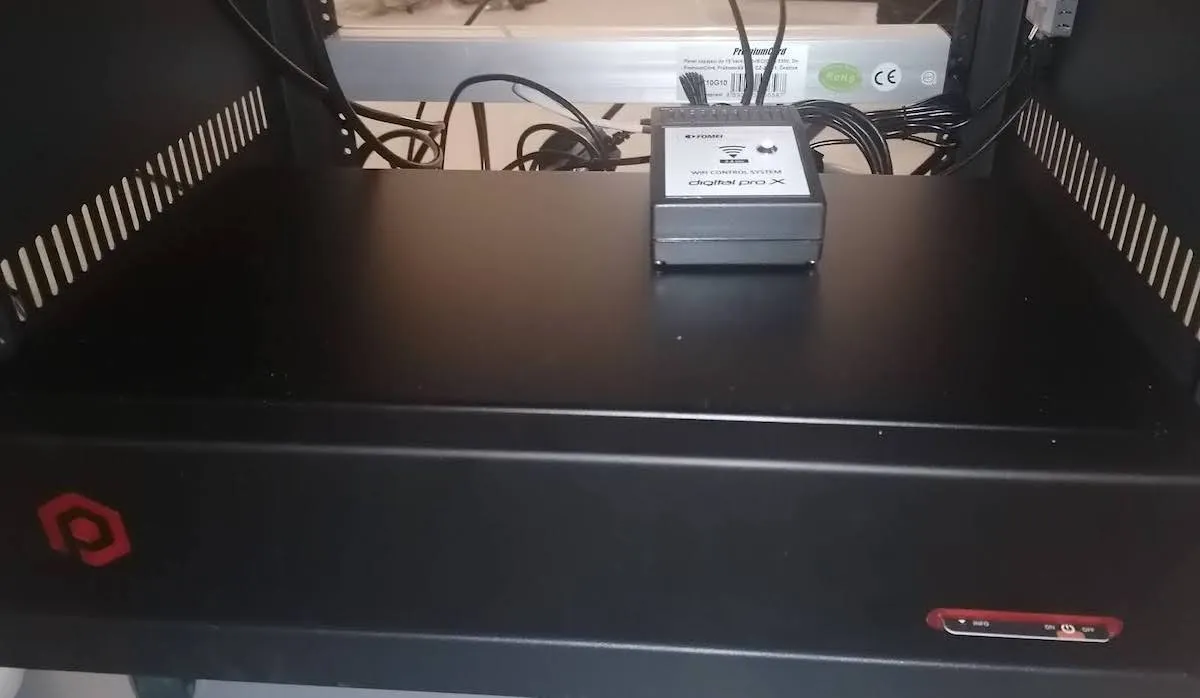
3.2.1. 要连接 Cube V5 / Cube V6 的所有配件,请首先从纸箱中打开路由器的包装,然后安装机架支架。接下来,连接电源线或适配器(取决于路由器的类型),然后将路由器插入机架外壳,然后将其拧紧。

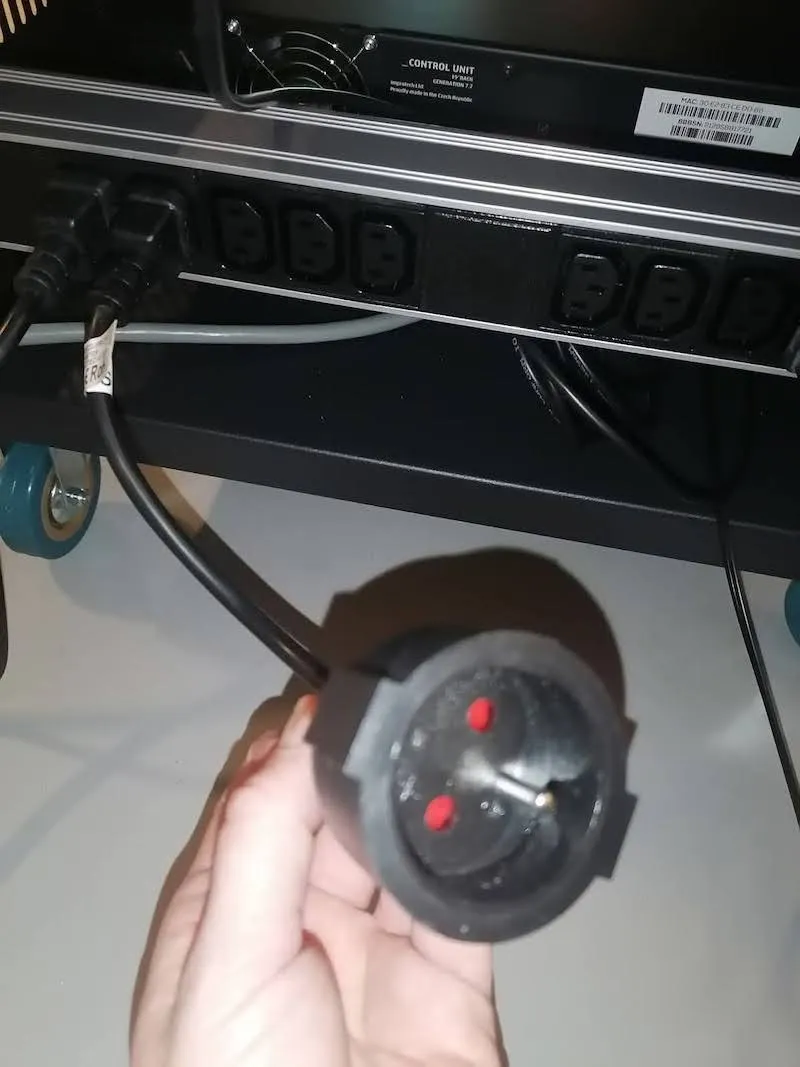
3.2.2. 用螺钉将电源多插座固定到机架背面的底部。
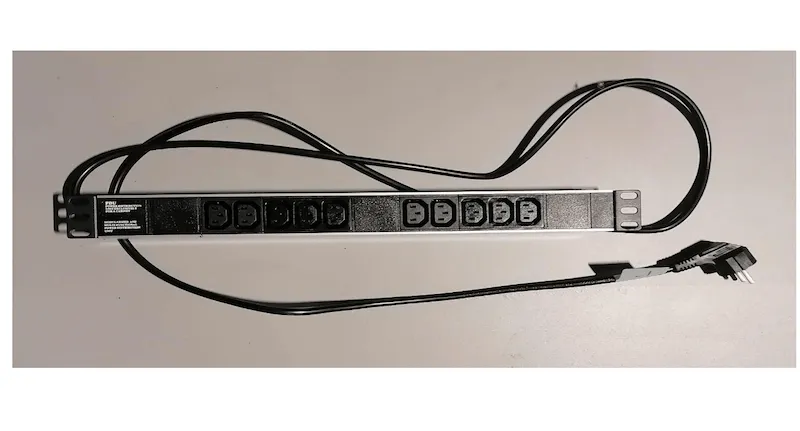

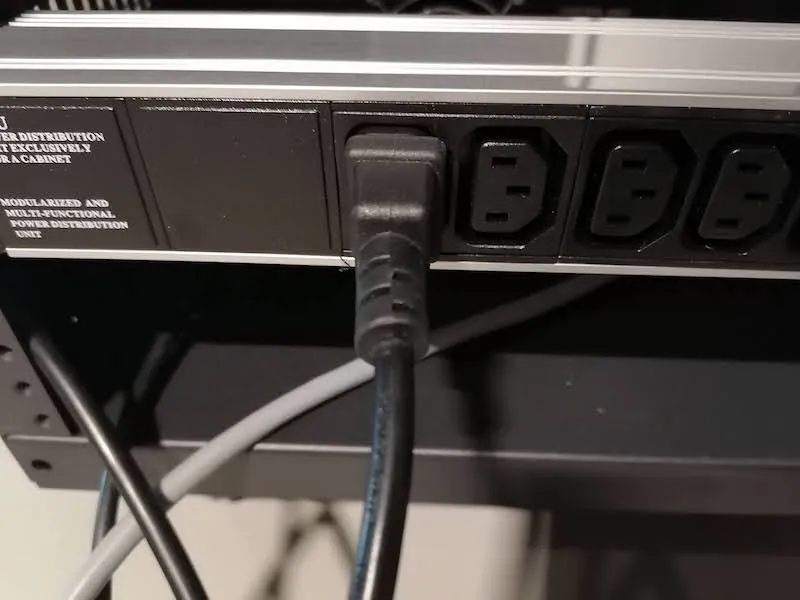
3.2.3. 如果交付的路由器有电源适配器,请找到电源适配器接口并将其插入任意电源多路连接器。



3.2.4. 找到控制单元电源线的自由端,并将其连接到电源多插座。
3.2.5. 使用最长的以太网电缆将电缆插入工作室的数据墙插座。请注意,默认情况下,预计可以通过此数据墙上插座访问互联网,因此将自动获取 IP 地址。


3.2.6. 将以太网电缆的另一端插入路由器的最后一个端口。使用端口号 10 或端口号 13,具体取决于路由器的类型。
3.2.7. 接下来,使用任意端口号 1-9 将以太网电缆的自由端从控制单元插入路由器。
3.2.8. 找到电源适配器接口,插上电源多插座。
3.2.9. 从纸箱中打开 Wi-Fi 模块的包装,找到另一根 2 米长的以太网电缆连接到 Wi-Fi 模块。以太网电缆的另一端使用任何端口号 1-9 连接到路由器。



3.2.10. 接下来,如果使用 Fomei 闪光灯,请打开 Fomei Wi-Fi 转换器和电源适配器的包装,然后连接设备。如果使用 Broncolor 灯,请参阅 PhotoRobot - Broncolor 灯管理。
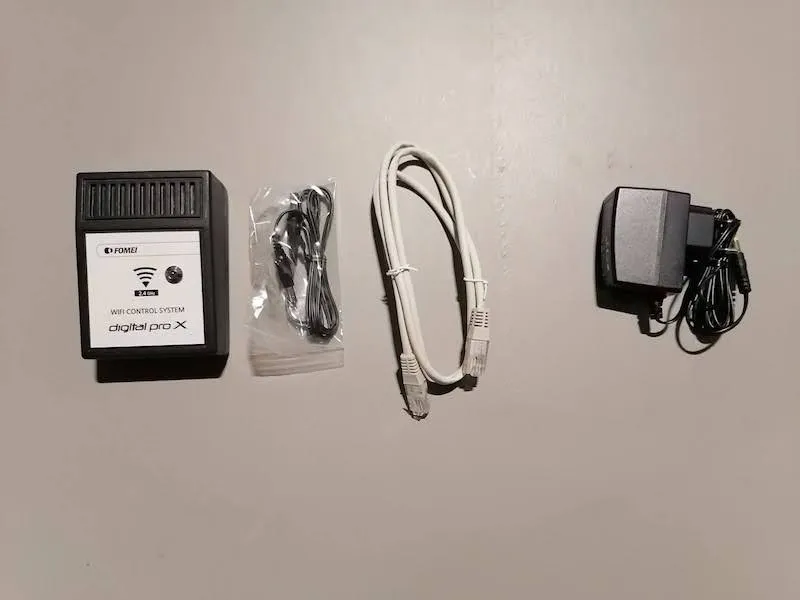

3.2.11. 将电源适配器接口插入电源多插座,然后插入适配器。电缆的另一端使用任何端口号 1-9 连接到路由器。

3.2.12. 将电源多插座插头连接到墙上插座。

3.2.13. 找到快门电缆终结器变体传递到您的相机型号,并将其插入快门电缆耦合器。


3.3. 纸质背景的组装
3.3.1. 要组装纸质背景,首先找到两个 Master LS 13-B 灯架。然后,将用于扩展器螺柱套件的 W-2 固定叉安装在每个支架的顶部。



3.3.2. 将镶嵌螺柱的纸质背景放在两个三脚架的固定叉上。一个将保持背景的左侧,另一个将保持背景的右侧。

3.3.3. 接下来,观看 安装螺柱组的屏幕录制,并重复视频中的步骤。

3.4. Cube V5 / V6 机器人的组装
3.4.1. 要将 Cube 机器人配置为支撑旋转人体模型躯干支架,首先打开机器人的包装并将其四条腿连接到设备底部。


3.4.2. 接下来,将电机电缆的另一端连接到 Cube,将两个螺钉固定在连接器上。


3.4.3. 连接设备后,将 Cube 机器人放在白色背景中央的地面上。将立方体放置在距离纸张 1 米的地方。
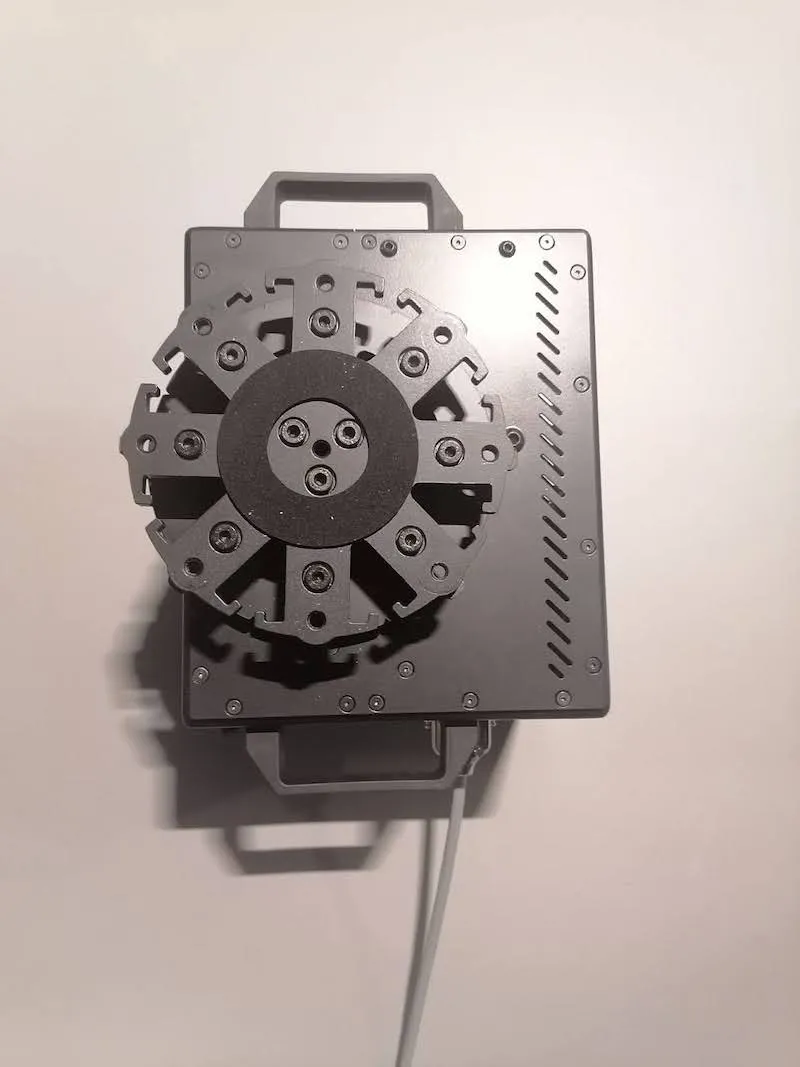

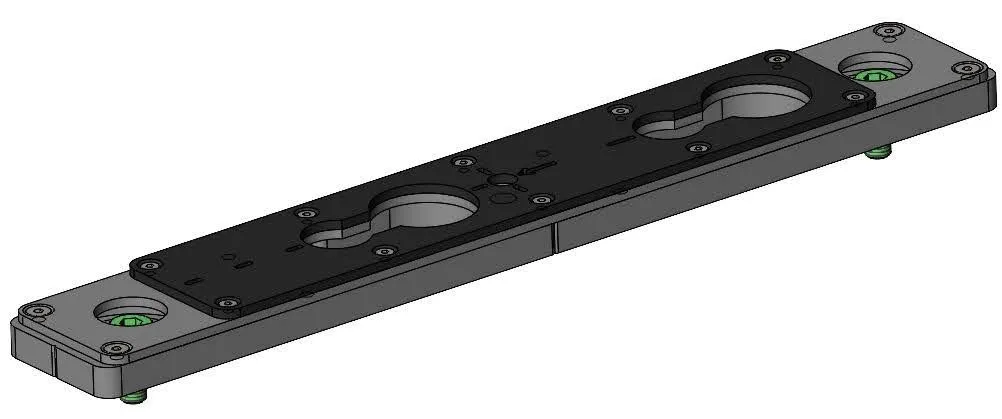
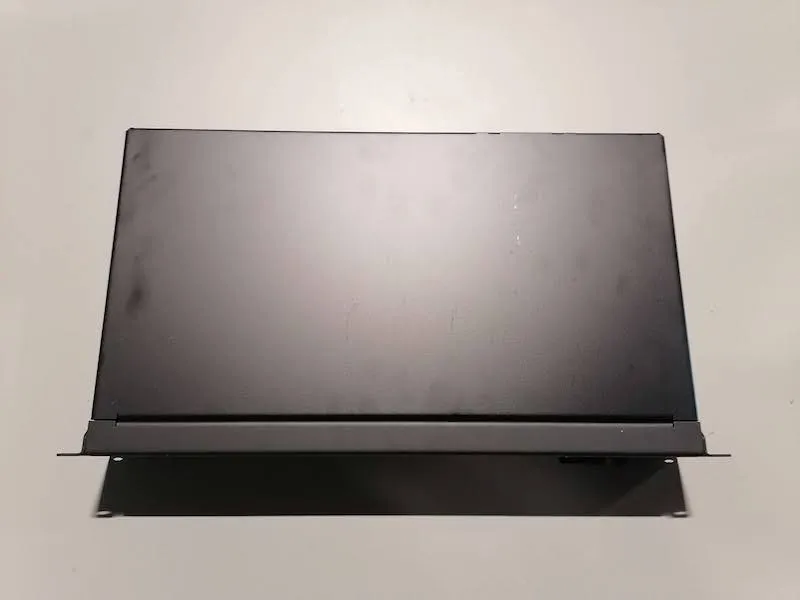
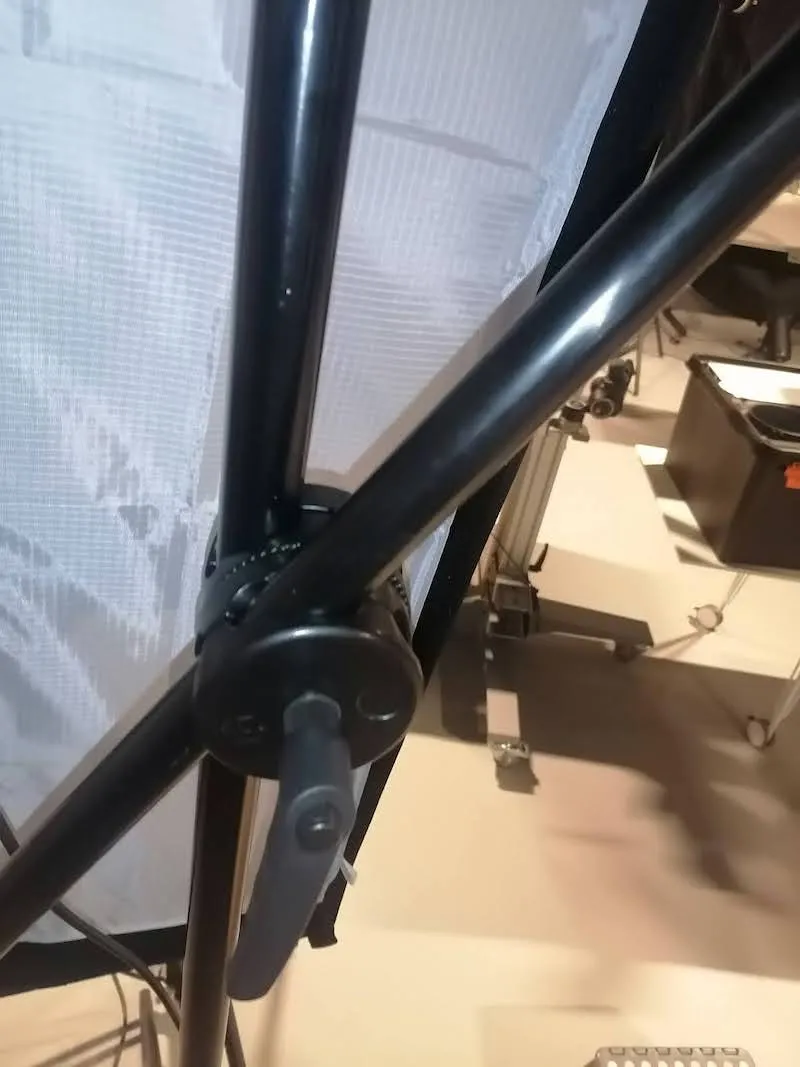
3.4.4. 将躯干支架的减速板放在 Cube 机器人的顶部,并用提供的四个螺钉将其固定到位。
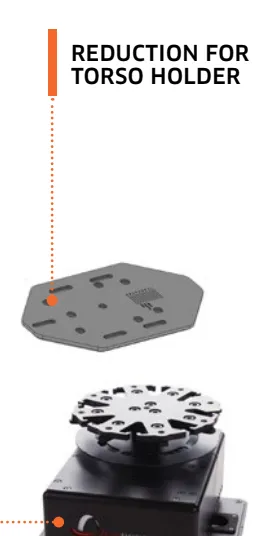
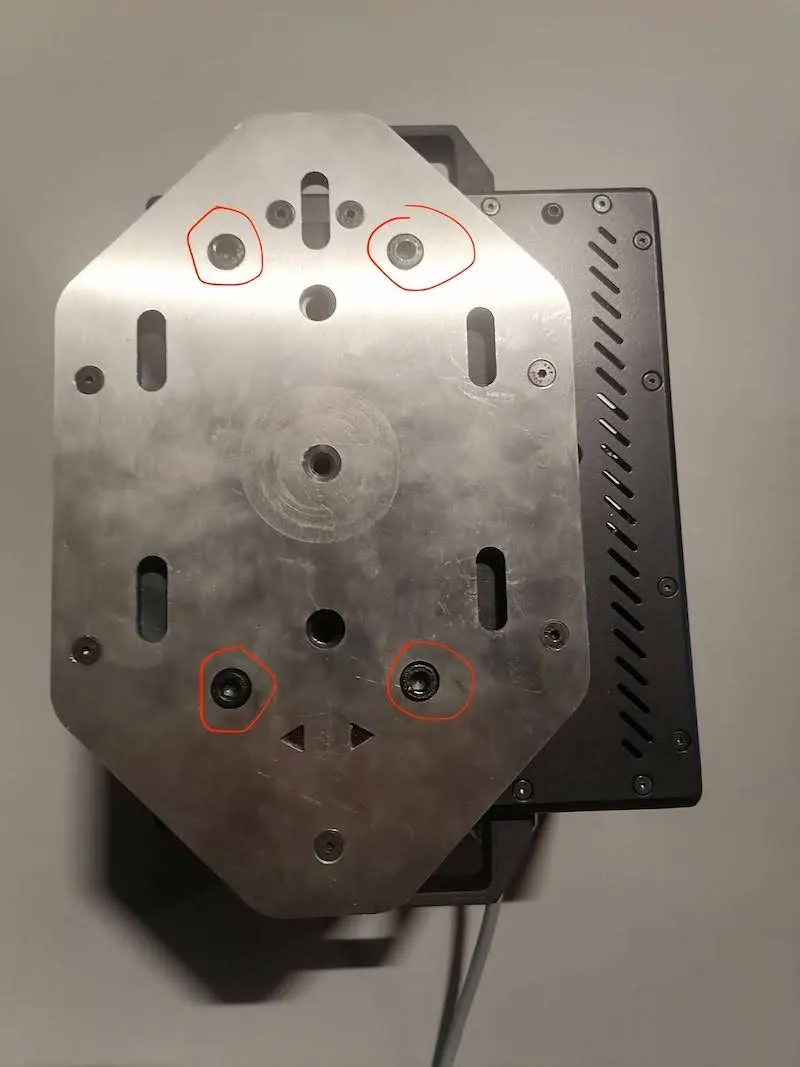
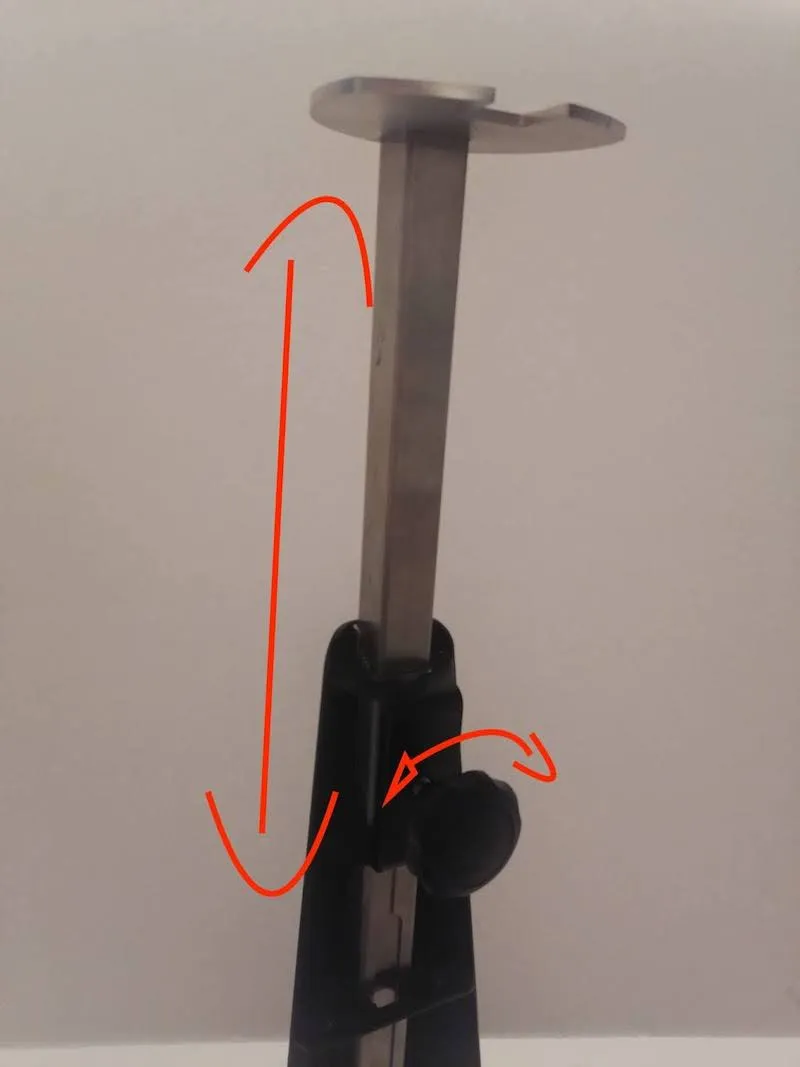
3.4.5. 将躯干支架的主体定位到减速板上,并使用大手螺钉将躯干支架固定到位。


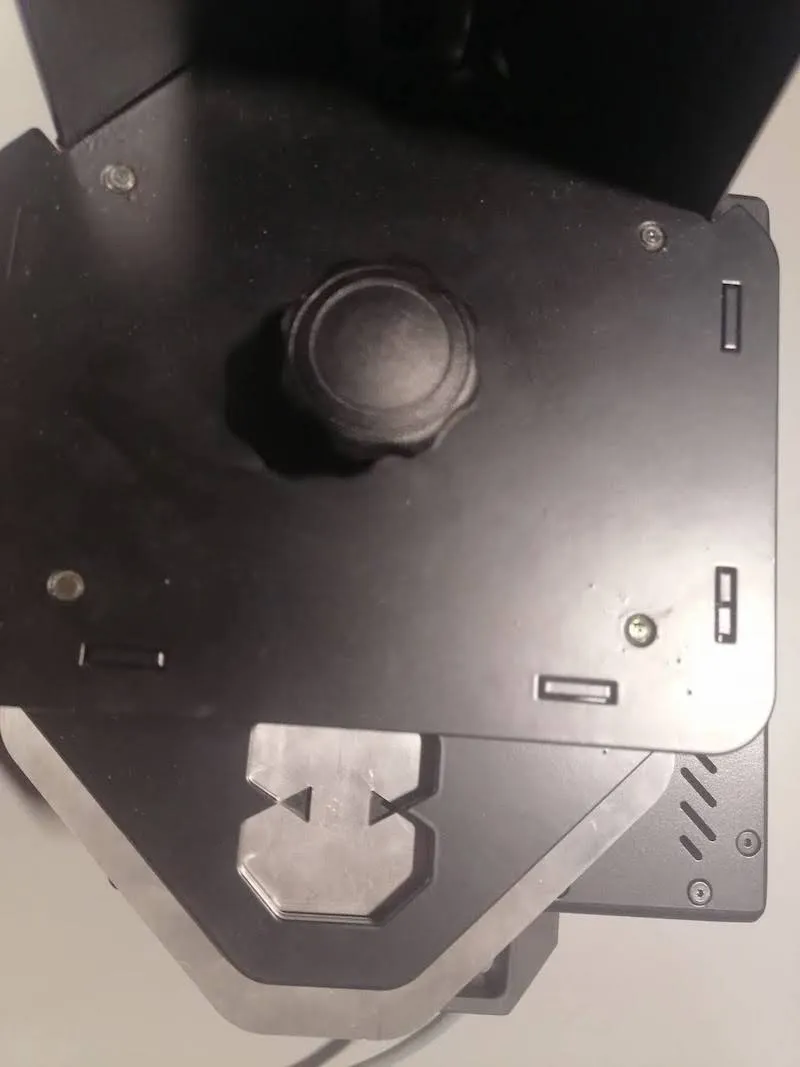
重要: 这一步要特别注意。确保通过躯干支架可以看到缩减板上的三角形符号。这意味着躯干支架已正确安装。
3.4.6. 此时,请注意,躯干的高度可以通过松开和拧紧手螺钉以及向上或向下滑动延伸件来调节。
3.5. 闪光灯设置
3.5.1. 要使用 Cube 机器人设置闪光灯,首先从盒子中打开闪光灯的包装,然后将指示灯插入每个闪光灯中。


注意: 要插入指示灯泡,请小心地从主灯上拧下玻璃。然后,在从纸箱中取出先导灯泡之前,对主灯泡的玻璃保护器执行相同的作。处理先导灯泡时请务必用餐巾纸或布,否则其使用寿命可能会大大缩短。接下来,将先导灯泡插入连接处的确切位置,如下图所示。




准备好后,记得重新戴上玻璃保护膜,然后重复前面的步骤来组装每盏灯。

3.5.2. 设置指示灯泡并更换玻璃保护膜后,将电源线连接到所有闪光灯。


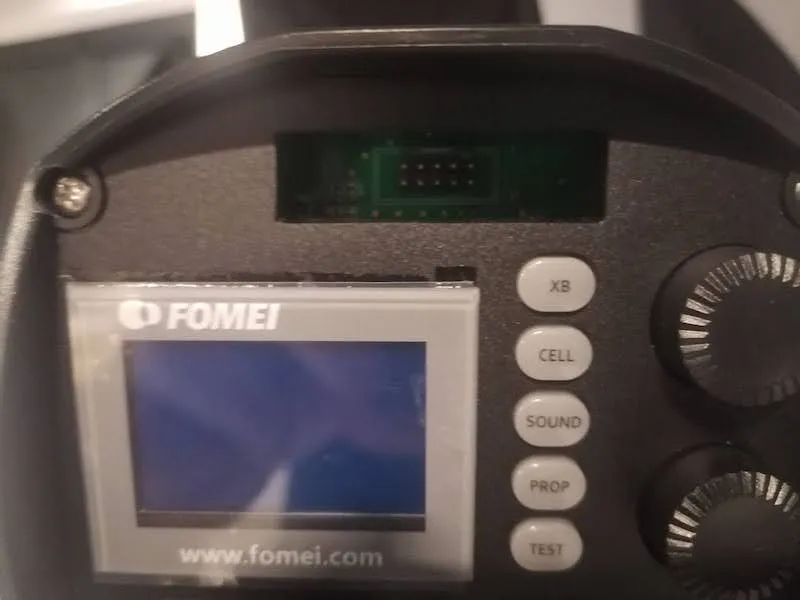
3.5.3. 然后,将接收器插入每个灯中,并注意 FOMEI 标签的方向。


3.5.4. 将电源线的自由端从灯插入电源多插座。


3.5.5. 打开所有闪光灯的电源。

3.5.6. 按照以下推荐的灯设置,将灯物理放置在机器人周围。
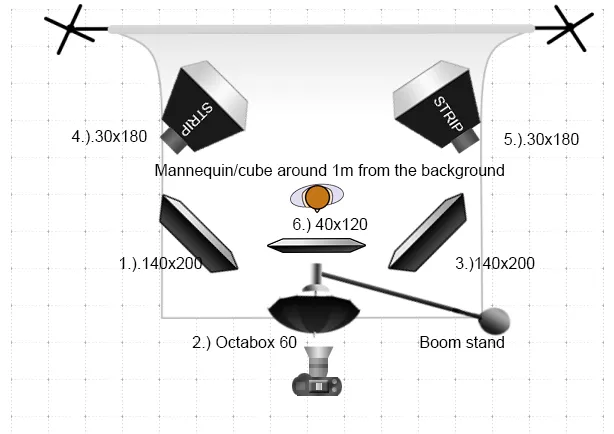
3.5.7. 请注意,如果按照推荐的灯设置安装吊杆支架,则需要首先建造吊杆支架。要建造吊杆支架,您需要一个三脚架、一根 1.5 米长的墙吊杆和一个墙吊杆组。



此外,请参阅下图了解吊杆支架的构造。
a) 墙臂杆夹:
b) 杆末端的平衡重量以支撑灯光:

c) 已建造的吊杆支架的说明性图片:

4. PhotoRobot _Controls软件
软件PhotoRobot _Controls应用程序提供对整个 Cube V5 / V6 / 紧凑型机器人工作站的控制。这包括对所有机器人、摄像头和照明的远程控制。该软件管理工作流程并提供后处理领域有效自动化所需的功能。
PhotoRobot _Controls应用程序软件可通过您的PhotoRobot帐户下载。它不包含在机器交付中。PhotoRobot _Controls App 软件与机器分开购买。
此外,启动软件应用程序后,请注意界面可能会在“向导模式”下自动启动。向导模式是一种简化的用户界面。例如,它允许扫描条形码以识别物体并自动开始捕获和后处理序列。
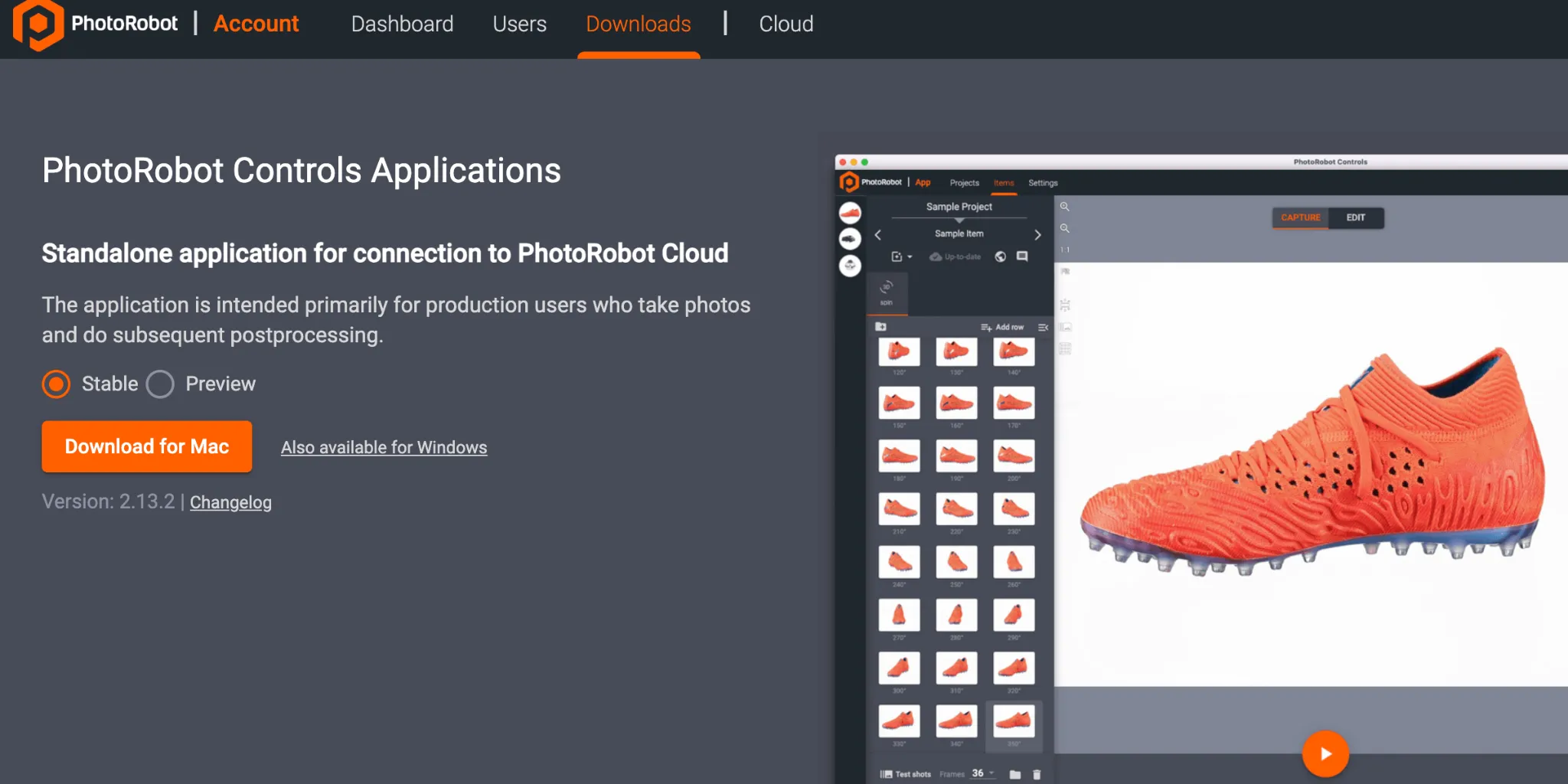
注意: CAPP 的 稳定版 和 预览版 都可以通过安装程序向导下载。稳定版包含最新版本的 CAPP,并经常发布版本。同时,CAPP 的预览版提供了对最新功能和修复的早期访问,这些功能和修复程序在开发后几天内转移到稳定版本。这允许用户在联系支持人员之前测试预览版中出现的任何问题,因为稳定版上报告的大多数问题已经在预览版上得到解决。但是,请注意,不建议将预览版用于稳定性是关键因素的生产用途。预览版正在积极开发中,其中可能仍包含不完整的功能或未解决的错误。
重要:由于存在数据库损坏的风险,旧版本的 CAPP 不适用于客户或公共分发。旧版本的 CAPP 仅供授权的 PhotoRobot 技术人员访问,用于内部开发或极其特殊的用例。要查找 CAPP 的最新稳定版本和预览版,请参阅 CAPP 最新下载版本。
有关 PhotoRobot _Controls App 的支持或故障排除,请参阅PhotoRobot入门。
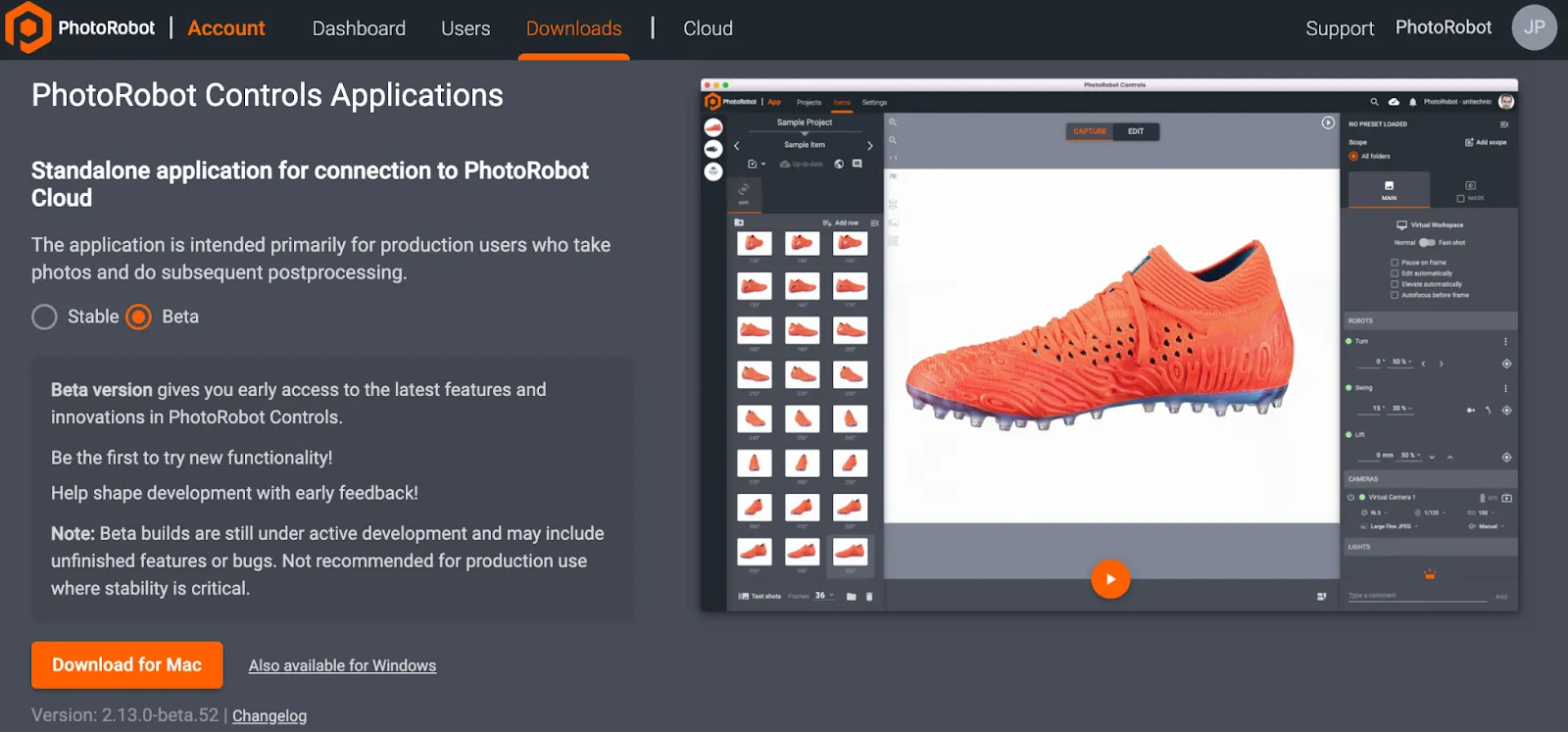
5. 信息标签
5.1. 符号概述
5.2. 立方体紧凑标签



EOS Rebel 系列


EOS DSLR 系列


EOS M 微 单镜系列


PowerShot 系列


特写/ 手持

佳能 EOS Rebel 系列提供适合初学者的 DSLR 相机,具有稳定的图像质量、直观的控制和多功能功能。这些相机是摄影爱好者的理想选择,提供可靠的自动对焦、可变角度触摸屏以及全高清或 4K 视频录制。
连接
分辨率 (MP)
分辨率
佳能 EOS DSLR 系列提供高质量的图像、快速的自动对焦和多功能性,使其成为摄影和视频制作的理想选择。
连接
分辨率 (MP)
分辨率
佳能 EOS M 微单镜系列将紧凑的设计与类似 DSLR 的性能相结合。这些相机具有可更换镜头、快速自动对焦和高质量图像传感器,非常适合在不牺牲图像质量的情况下寻求便携性的旅行者和内容创作者。
连接
分辨率 (MP)
分辨率
佳能 PowerShot 系列为休闲拍摄者和爱好者提供紧凑、用户友好的相机。从简单的傻瓜相机到高级变焦相机,它们提供便利性、稳定的图像质量以及图像稳定和 4K 视频等功能。
连接
分辨率 (MP)
分辨率


