使用PhotoRobot系统捕获映像
在PhotoRobot控制应用程序(进一步称为“CAPP”)中创建工作区后,捕获界面允许用户控制PhotoRobot硬件和相机,以自动捕获图像和视频。
捕获接口
CAAP 捕获接口由 4 个主要区域组成:
- 项目信息
- 文件夹、框架和图像
- 硬件配置
- 顺序控制
创建新项目
在 CAPP 中,项目可以由一个或多个单个项目组成,而该项目通常是特定的拍摄对象。然后,项目可以包含一个或多个文件夹,以将不同类型的图像分开。最常见的示例是为 360 度旋转指定一个文件夹(“旋转”),为静止图像指定另一个文件夹(“静止图像”)。
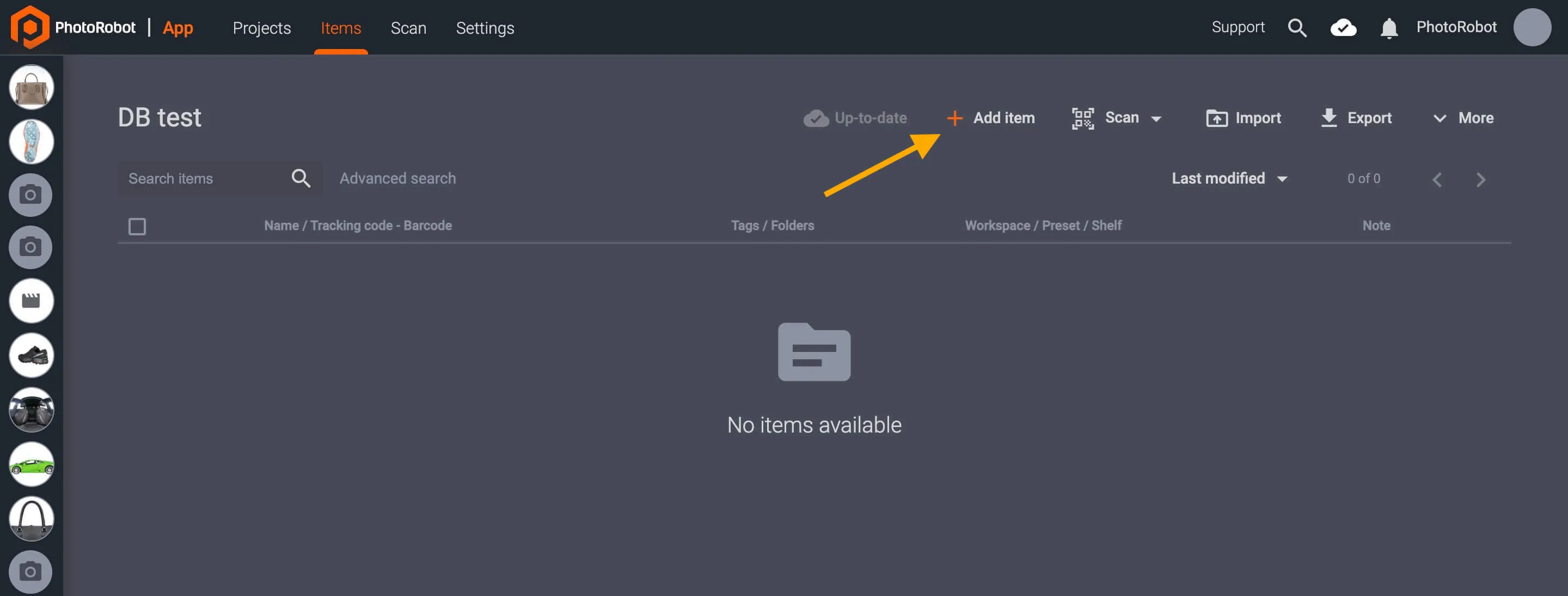
在开始摄影之前,您必须添加一个新项目(除非使用现有项目),并且至少有一个项目。
若要手动创建新项,请转到 “项目 ”,然后选择“ 添加项”。
接下来,在出现的窗口中,填写必填的“名称”字段将启用“添加”按钮以创建新项目。在这里,还有一些选项可以填写更多项目信息:代码、链接、注释、宏等,尽管这些字段只是可选的。
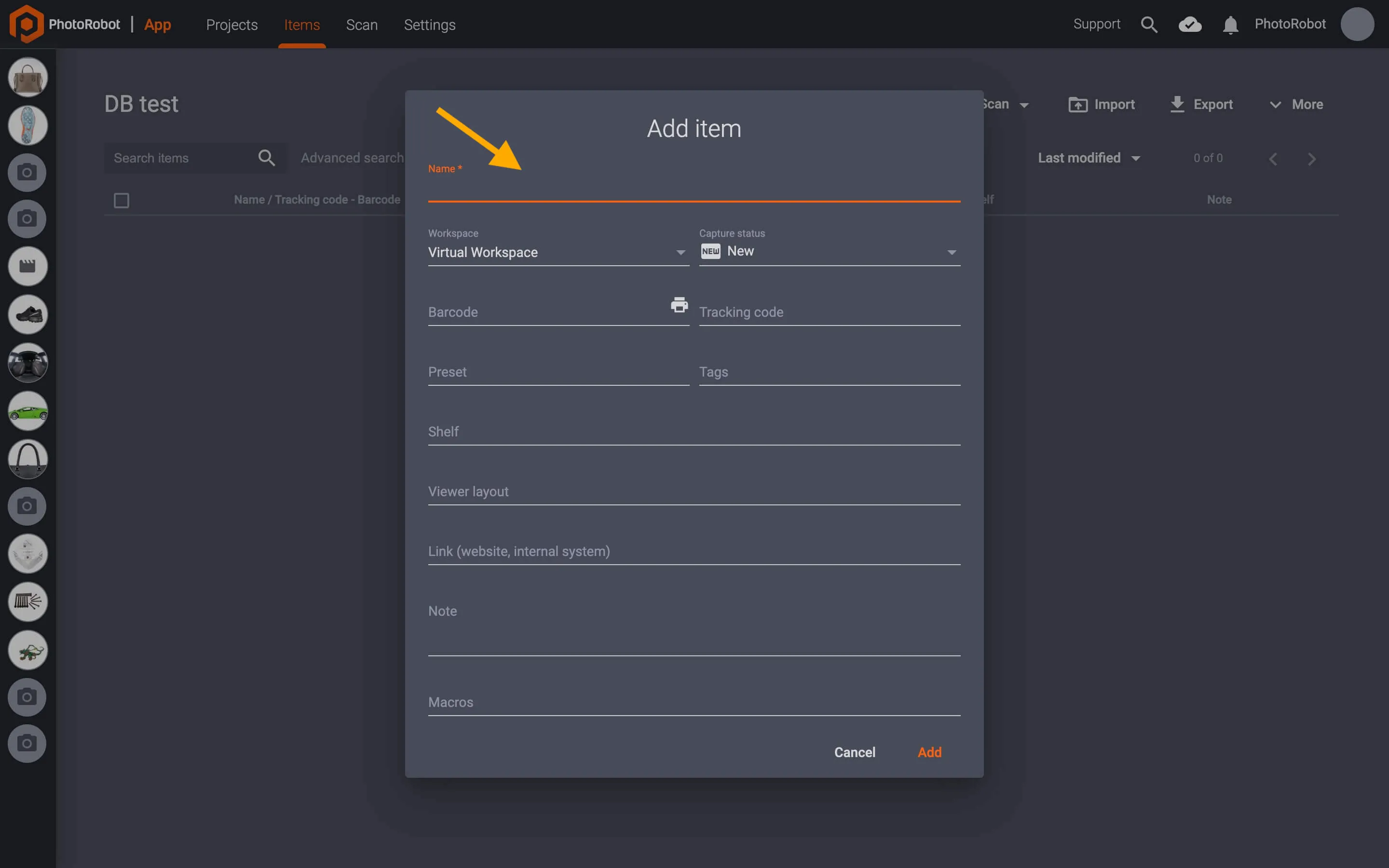
注意: 如果新商品有条形码,则可以在手动创建新商品时将商品条形码输入或扫描到系统中:
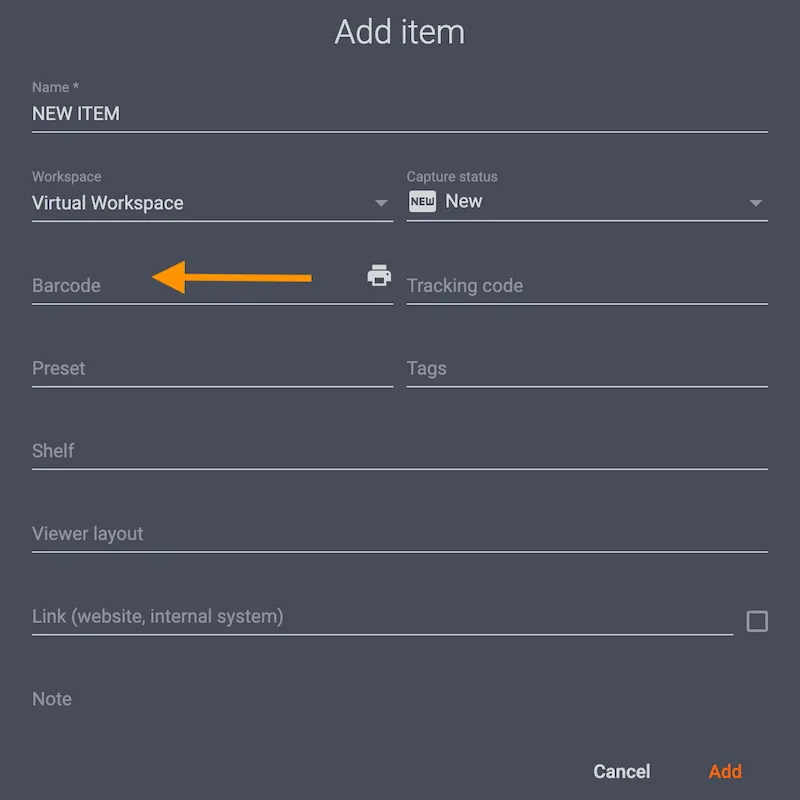
将商品条码添加到商品中,可以通过单击商品信息区域中的条码按钮直接在捕获模式界面中显示条码。
请记住考虑您用于 CAPP 的许可证类型。 如果使用基于云的许可证,则除了上述字段中的属性外,还会有更多属性。
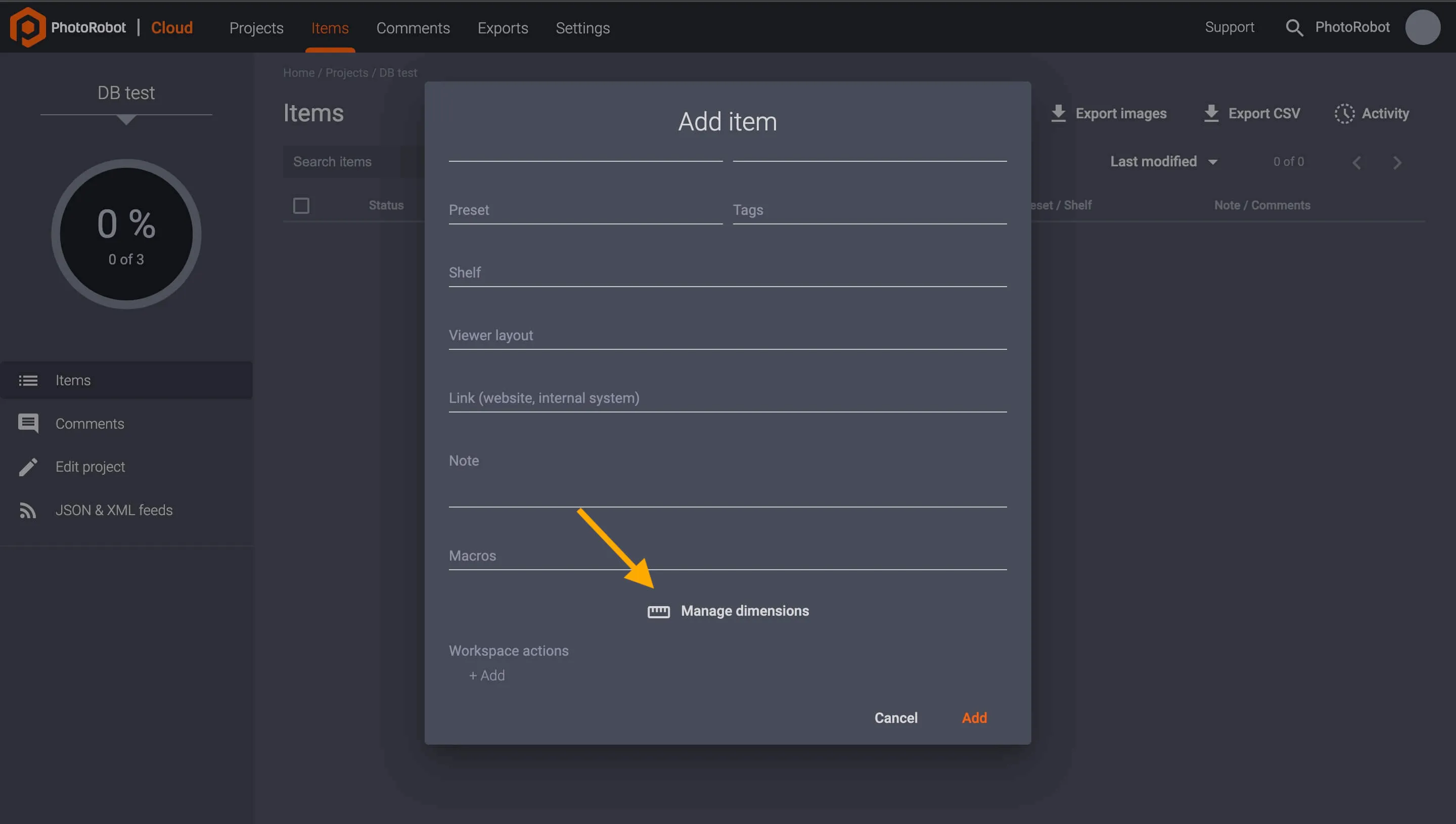
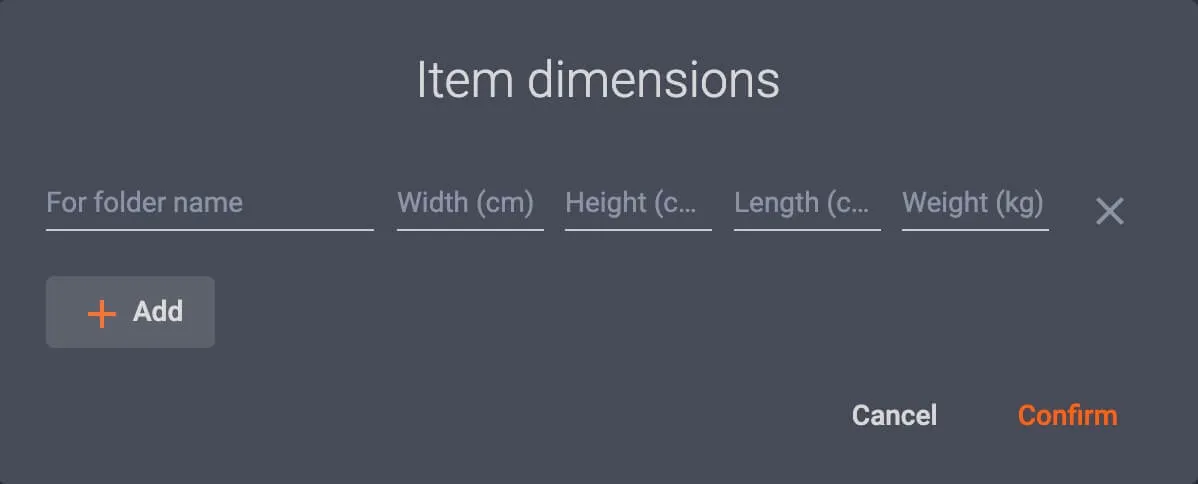
使用基于云的许可证,滚动到新项目选项的底部,然后选择管理 维度 以添加项目的宽度、高度、长度和重量。注意:有效的基于云的订阅使用户能够无限制地添加测量值。填写属性,然后选择 “确认 ”以将维度添加到物料中。
单击“ 添加 ”,然后创建具有所有用户配置属性的新项。
导入新项目
此外,可以使用 导入 功能在一次批次中创建多个项目。项目导入功能的先决条件是通过 CSV 文件导入。CSV 文件包含用户将导入的每个项目的所有属性。
CSV 文件以纯文本形式存储表格数据,并使用分隔符分隔每个单独的数据记录。注意:有一个用于项目导入的sample-import.csv文件,可直接在应用程序中下载。
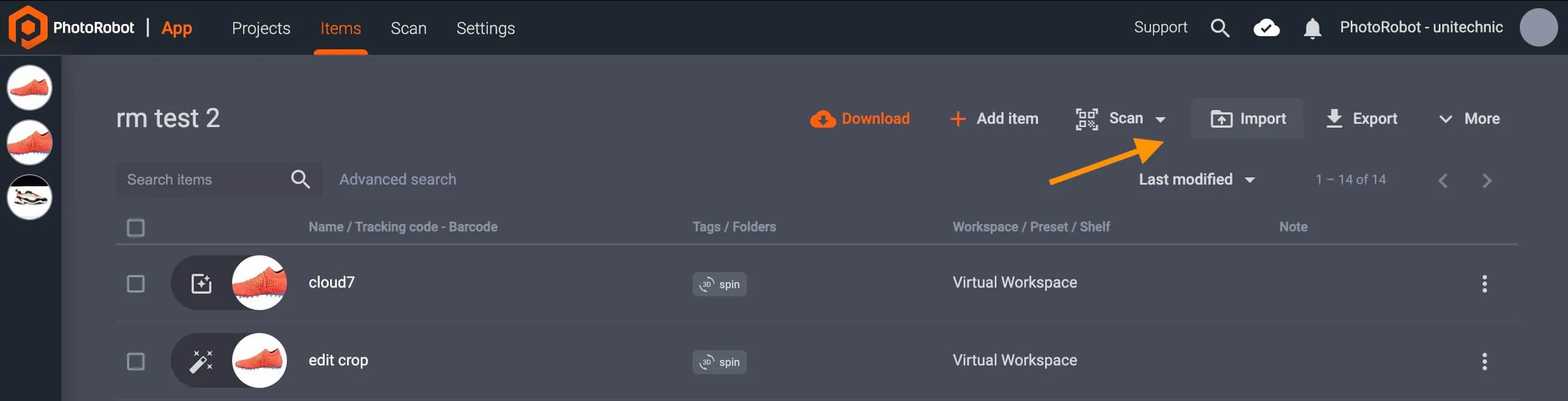
要导入新项,请转到“ 项目 ”,然后选择 “导入”。
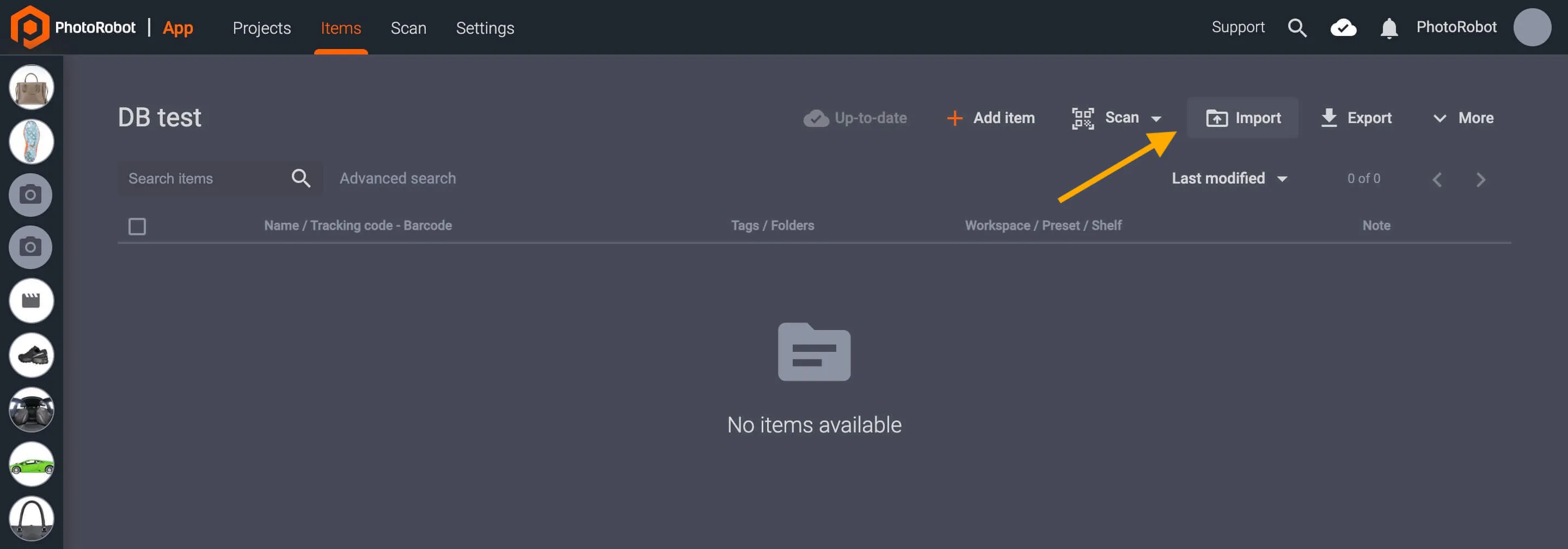
然后,在弹出窗口中,可以拖放CSV文件,或者通过浏览文件按钮浏览本地文件夹以导入到CAPP中。
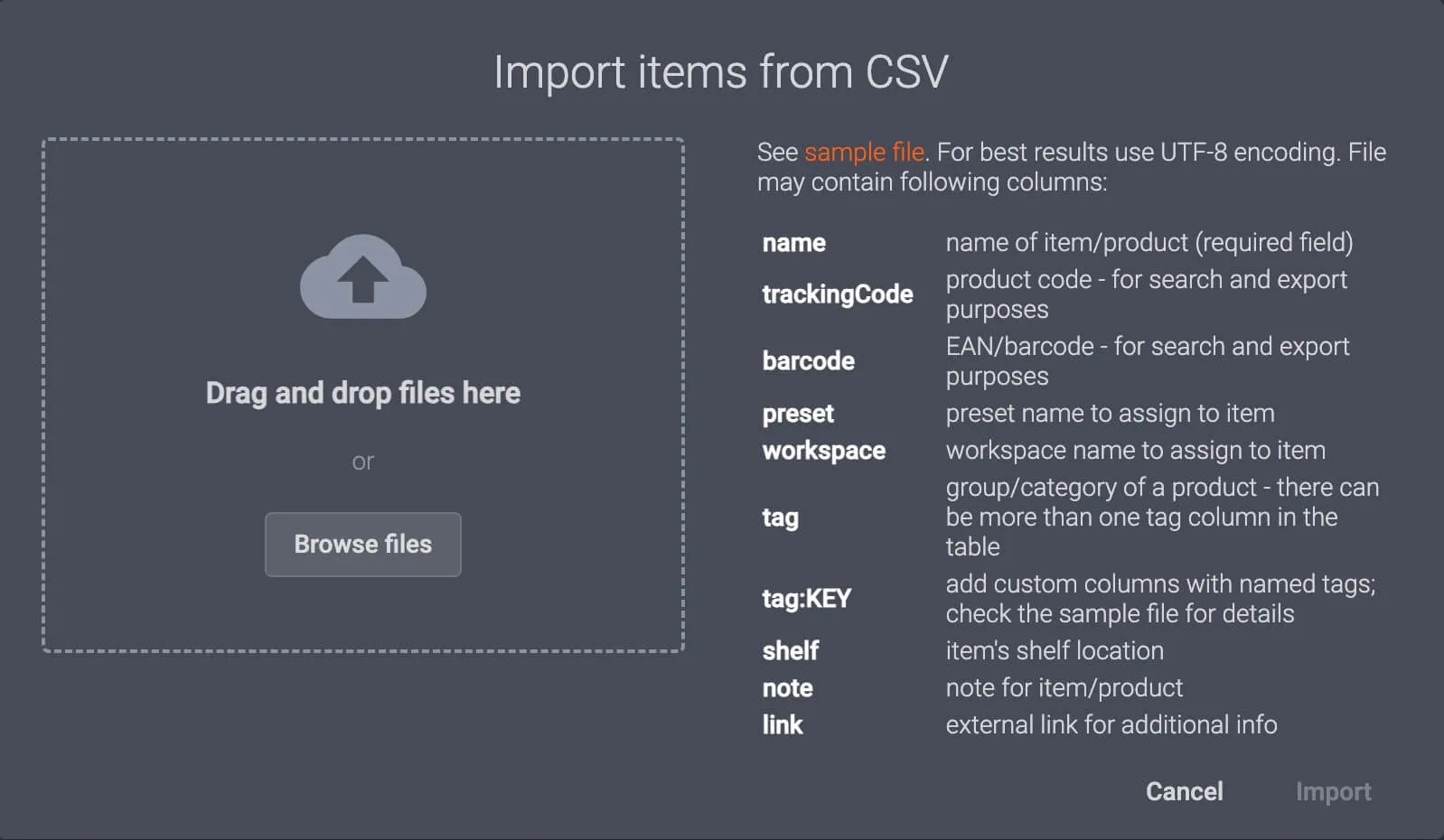
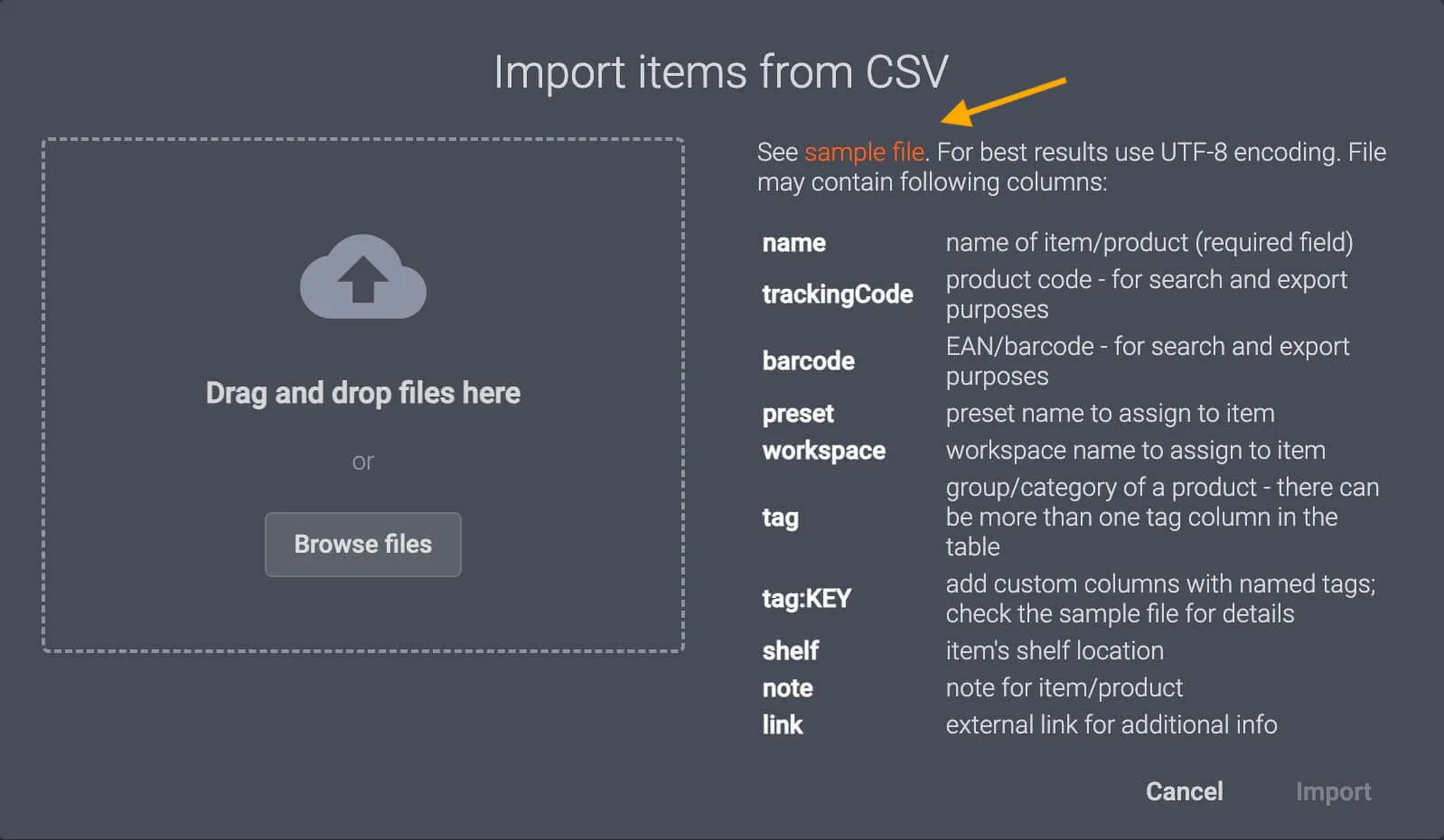
要使用示例 CSV 文件,请单击界面右上角的 示例文件 。这会将示例 CSV 下载到本地计算机。
记得: 项目导入可以包括项目尺寸(长度、宽度、高度、重量),而对活动用户许可证没有任何限制。
自动创建新项目
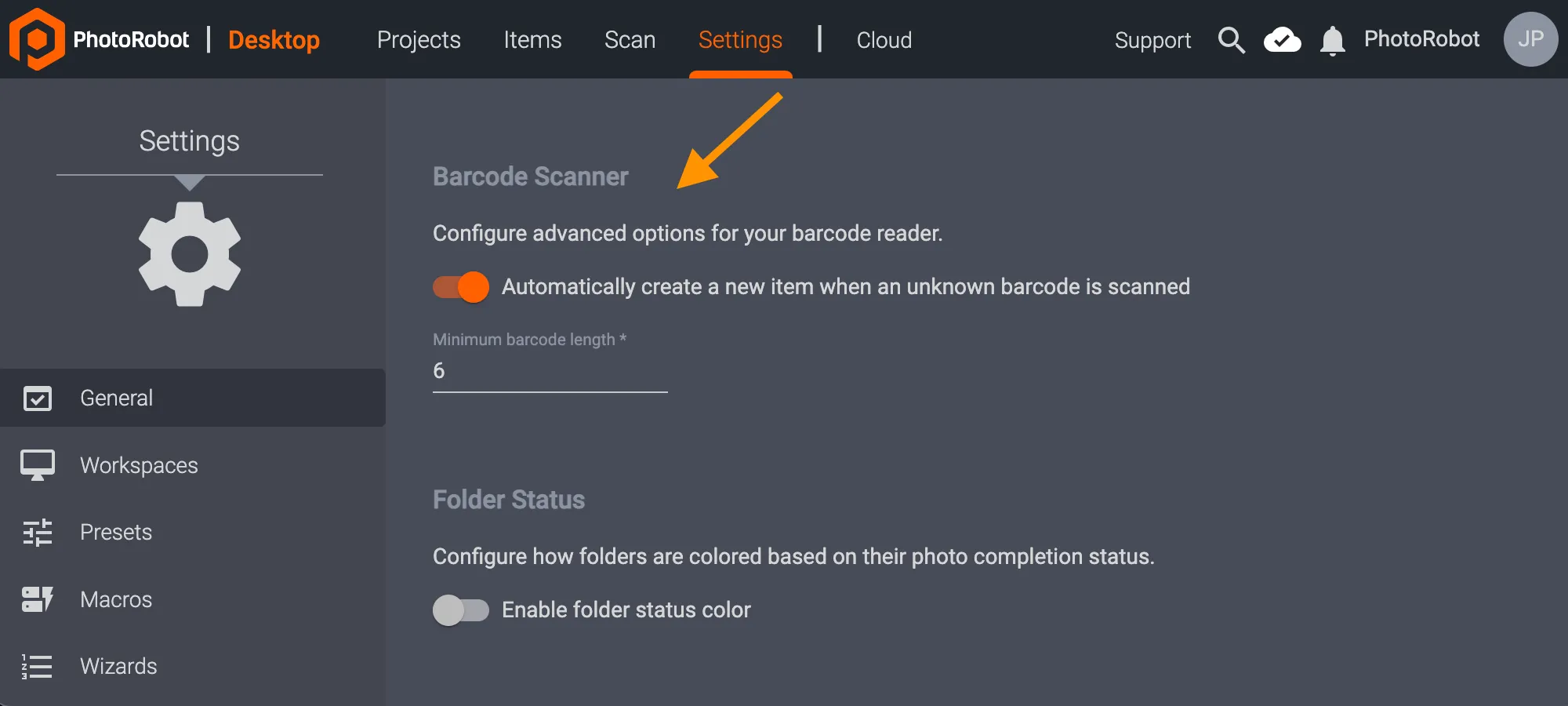
作为在 CAPP 中手动创建项目的替代方法,高级条形码扫描仪设置可以在扫描未知条形码后自动创建新项目。此设置用于在捕获点识别项目(通常通过条形码或二维码)。操作员只需扫描一个未知代码,项目中就会自动创建一个新项目。项目命名将根据扫描的字符串,并在项目的标识符字段中命名。
要启用或禁用条码扫描仪自动创建项目,请访问本地桌面版 CAPP 中的常规设置。接下来,找到条码扫描器设置,并使用切换开关配置扫描未知条码时自动在系统中创建新项目。
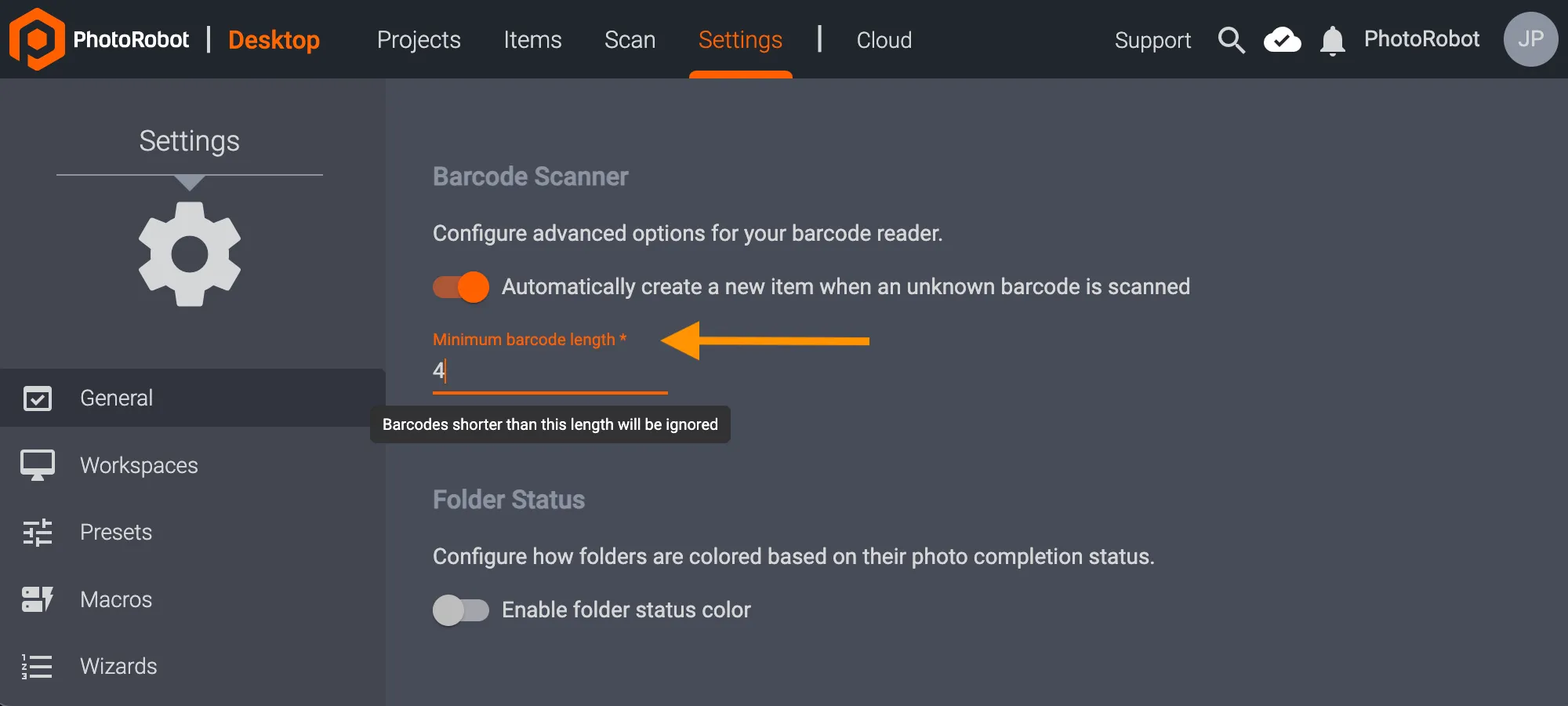
注意: 从 CAPP 版本 2.13.beta58 开始,现在可以选择配置条形码的最小字符串长度。以前,条形码/二维码的最小长度为 6 个字符(以避免对扫描字符串的双重解释等问题)。现在,这个数字是可调整的,例如,允许四字符标识符工作,而无需进一步调整。
要调整条形码/QR 码的最小字符串长度,请在常规设置 - 条形码扫描仪的本地版本 CAPP 中配置最小条形码长度。然后,系统将忽略短于输入长度的条码。
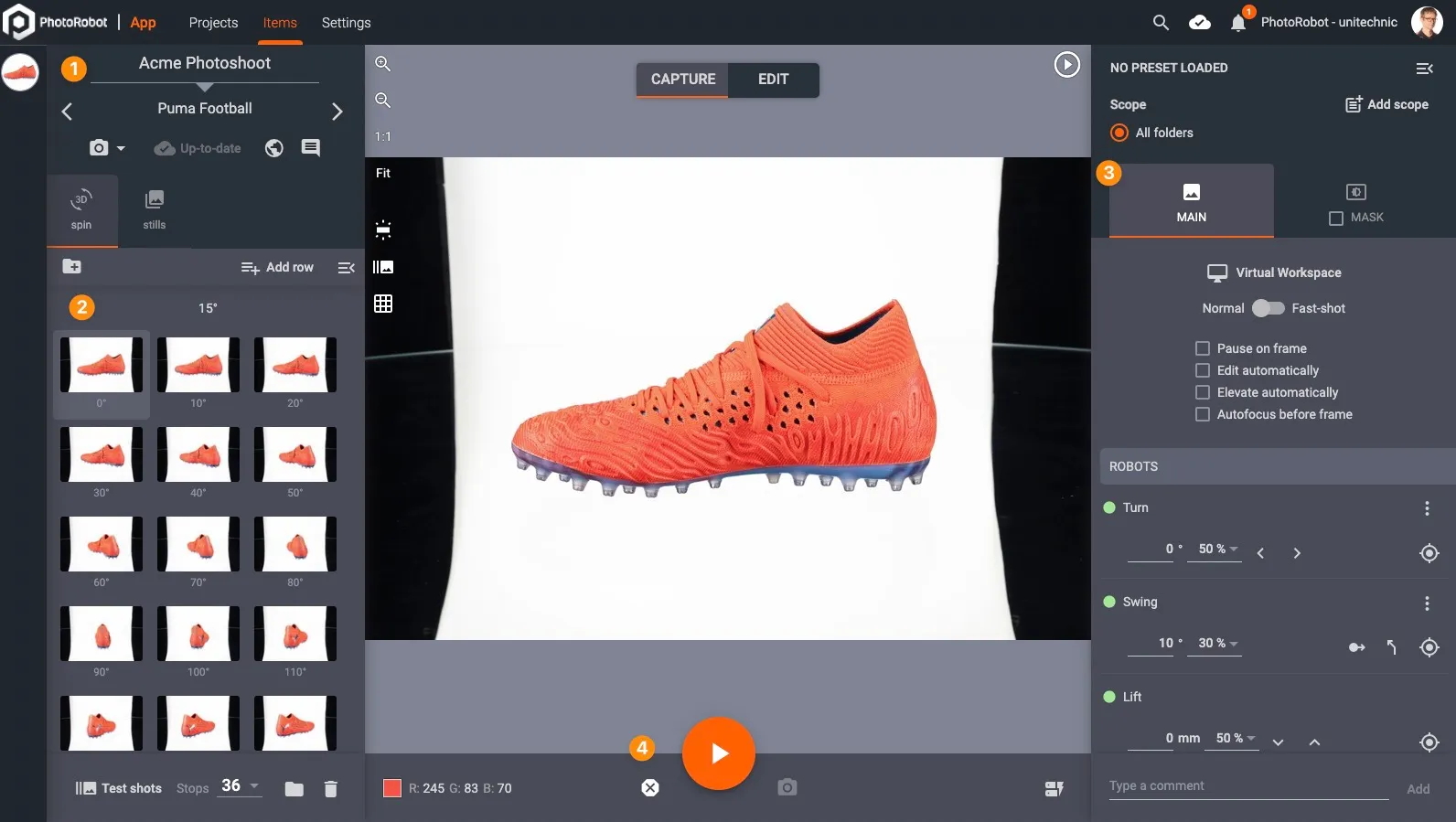
物品信息
CAPP Capture 界面的这一部分提供有关项目的基本信息,由 3 个主要区域组成。
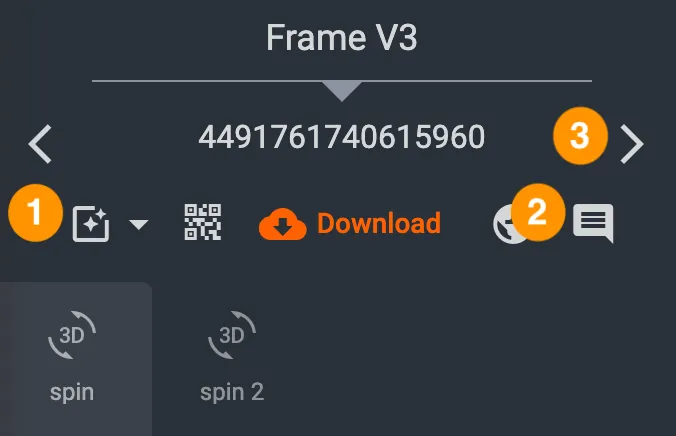
- 捕获状态 - 将项目状态切换为“捕获”、“已编辑”、“重新捕获”或“修复编辑”
- 注释 - 单击以访问所有项目级注释
- 下一个/上一个 - 用于根据所选项目状态筛选器在项目之间导航
注意: 如果商品包含手动输入或自动扫描到系统中的条形码,则商品信息区域也会显示条形码按钮。单击条形码按钮将启动一个弹出窗口以显示商品的条形码。
提示: 设置 项目状态过滤器 以限制结果以快速查找和导航项目。
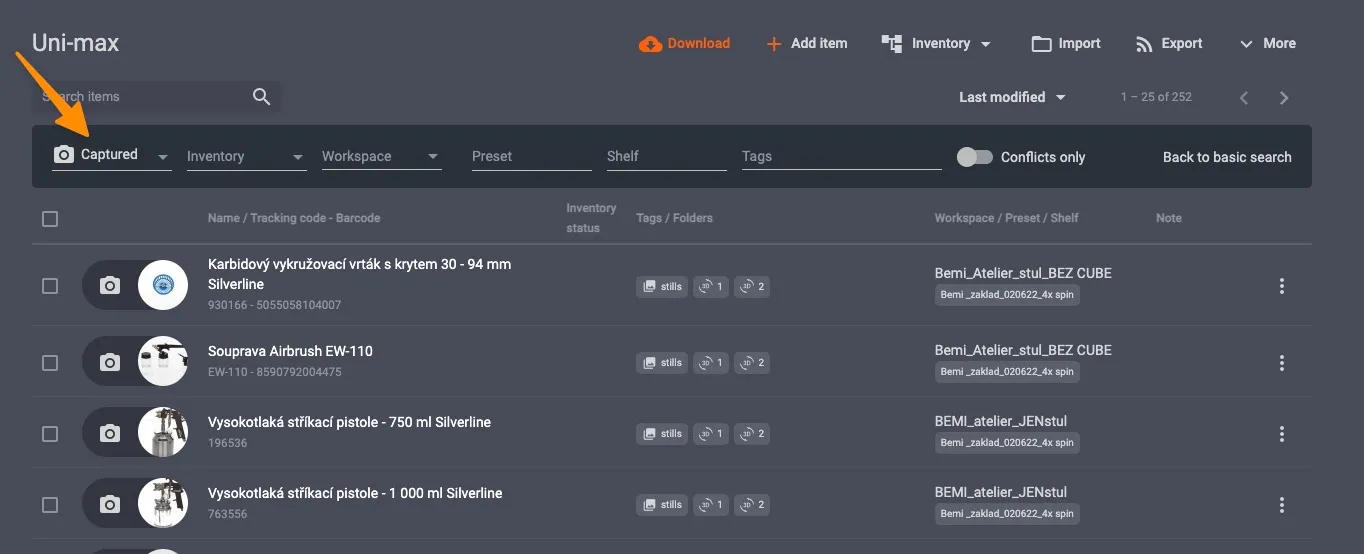
- 筛选结果以仅显示标记为: “已捕获”、“已编辑”、“已验证”、“已批准” 或 “已拒绝”的项目。
例如,如果负责验证图像,请将结果限制为“已编辑”,以便仅查找和查看已进行后处理的项目。审核后,将项目状态设置为“已验证”或“修正编辑”以批准或拒绝更改并通知团队成员。当图像准备好发布或需要进行更多编辑时,项目状态将通知责任方。
文件夹、框架和图像
所有视觉对象资产都组织到“文件夹”中,文件夹被划分为表示不同类型的输出。这三种类型的文件夹是:
- 旋转 (360 / 3D)
- 剧照
- 视频
每个文件夹都包含单独的框架。帧由有关拍摄角度的信息(摄影过程的说明)和图像的一个或两个版本组成:
- 原始文件 - 相机接收的原始文件
- 已编辑 - 通过PhotoRobot的后处理工具编辑的图像文件
按如下方式导航文件夹界面:
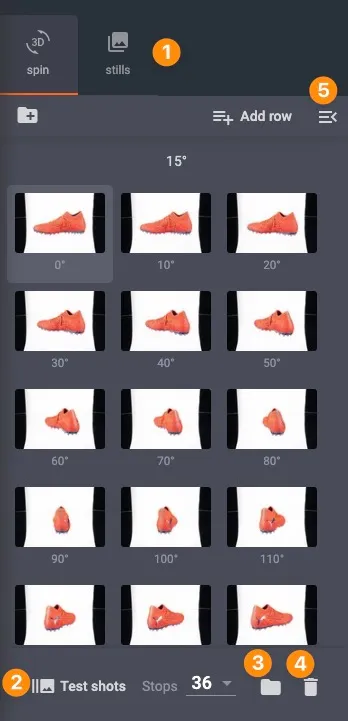
- 在文件夹之间选择 (1)
- 通过拍摄测试照片来试验配置 (2)
- 在本地计算机计算机上打开图像存储 (3)
- 用于重新拍摄的清晰照片 (4)
- 访问文件夹 菜单* (5)
文件夹菜单包含以下功能。
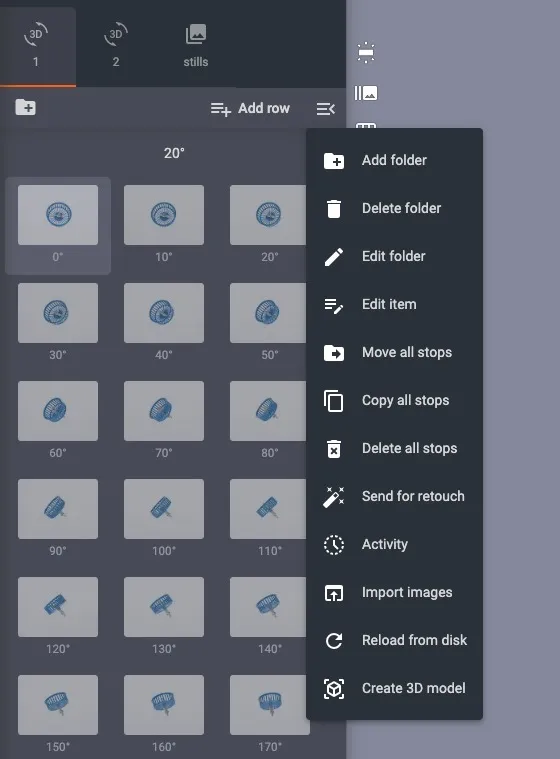
- 添加/删除/编辑文件夹
- 在文件夹之间复制/移动框架
- 删除帧 - 完全删除所有帧以及所有图像和角度配置
- 发送以进行修饰 - 标记用于外部修饰的项目
- 活动 - 查看项目的活动日志
- 导入图片 - 上传您自己的图片
- 创建 3D 模型 - 从文件夹中包含的图像生成 3D 模型(*仅在 MacOS 上可用;具有多种 PhotoRobot 支持的 3D 模型格式)
此外,每个框架内还有其他菜单选项:
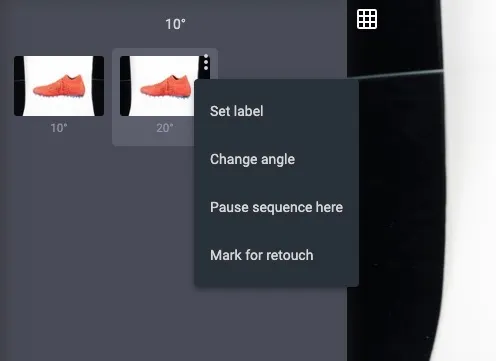
- 设置标签 - 为单个帧创建标签(例如,“英雄镜头 - 正面”、“3 / 4”、“背面”或 GS1 图像命名约定)
- 更改角度 - 调整单个框架上的角度
- 此处的暂停序列 - 选择此选项可暂停此帧处的摄影序列,然后等待操作员恢复拍摄
- 标记修饰 - 为外部第三方修饰指定图像
顺序控制
要开始序列,请按屏幕底部的“ 播放 ”按钮 (1):
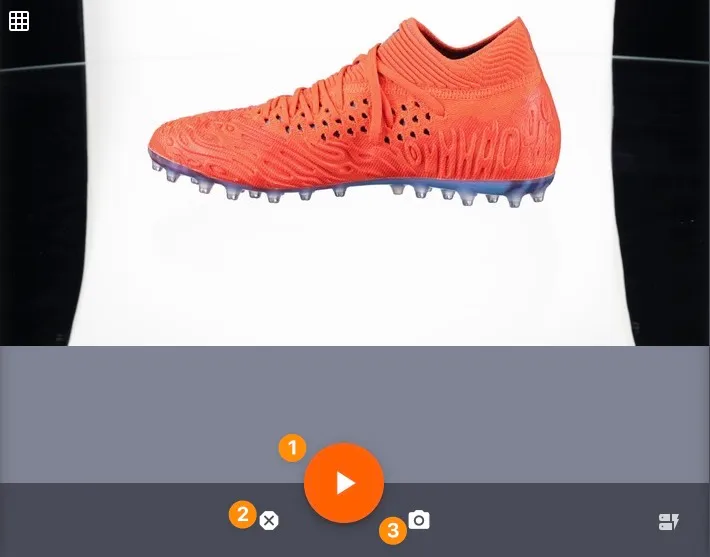
随时通过 紧急停止 按钮 (2) 中断序列。
在静止文件夹中,使用“ 拍摄快照 ”按钮 (3) 捕获帧,而无需先定义帧。然后,快照将被捕获并作为新帧包含在静止文件夹中。
序列选项
沿着 CAPP 界面的右侧面板,配置序列选项。序列选项包括:
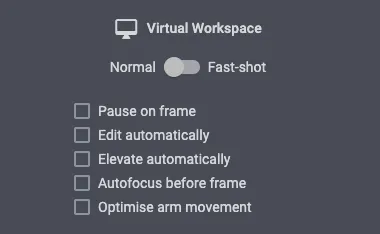
- 工作区配置 - 访问工作区或在工作区之间更改
- 正常与快速拍摄切换 - 配置为在拍照前暂停转盘旋转(正常),或者为了明显加快序列,配置为在不间断旋转期间拍照(快速拍摄)
- 在帧上暂停 - 切换到命令唱盘旋转以在每帧后停止(在创建产品动画时很有用)
- 自动编辑 - 配置为在捕获后立即自动编辑
- 自动提升 - 启用以在开始序列之前自动提升到产品中心(使用物料维度)
- 优化手臂运动 - 序列结束后,手臂将保持在最后拍摄的行的位置。以下序列将从此位置开始。
纺
在 Spin 文件夹中,查找 360 度产品照片的选项。
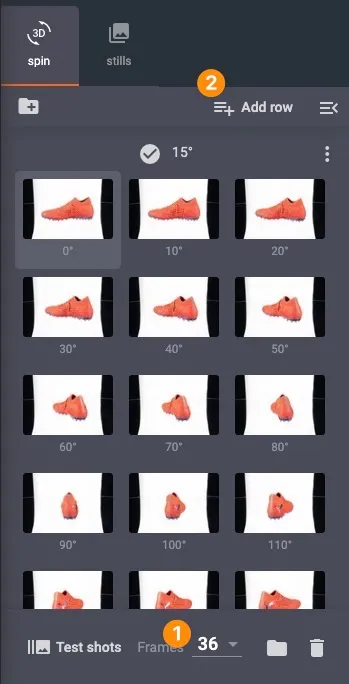
配置 帧 (1) 以选择要捕获的每次旋转的帧数(例如 24、36 等)。使用 “添加行 ”(2) 指定从不同的摆动角度(相机指向对象的垂直角度)捕获其他行。
剧照
若要定义要在静止文件夹中捕获的帧,请使用界面右上角的 “添加帧 ”。

或者,按 拍摄快照 以同时拍摄照片并创建相应的新帧。通过WiFi连接相机以手动拍照,并自动将新帧(特写,细节镜头)添加到静止图像文件夹中。
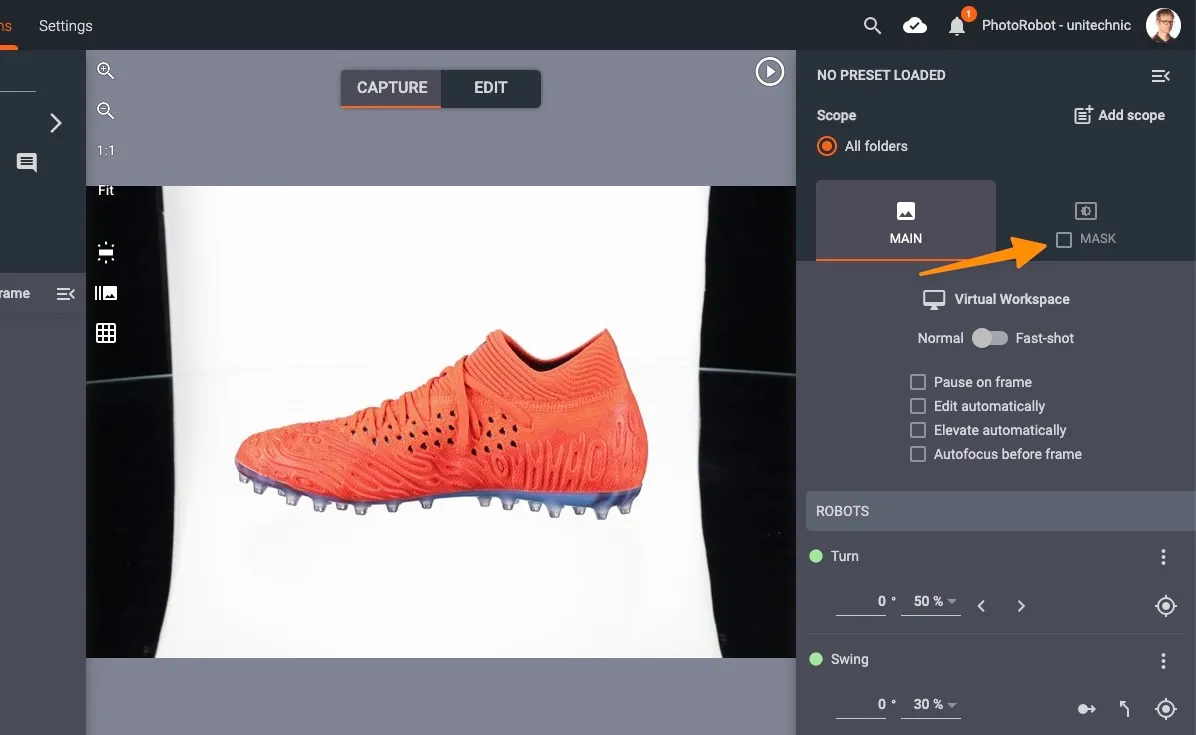
免费蒙版背景去除
自由掩码背景删除是一个过程,其中为每个帧捕获两个图像:
- 主图像 - 对象的标准照片
- 遮罩图像 - 从后面照亮的物体的照片


然后对这两个图像进行合成,以获得在对象周围有效删除背景的照片:

要启用免费掩码,请选择右侧面板上的 “蒙版 ”复选框:
硬件配置
机器人
根据机器人(或机器人组合),最多有 3 种类型的机器人运动,以及每个运动的位置、速度和校准的控制选项:
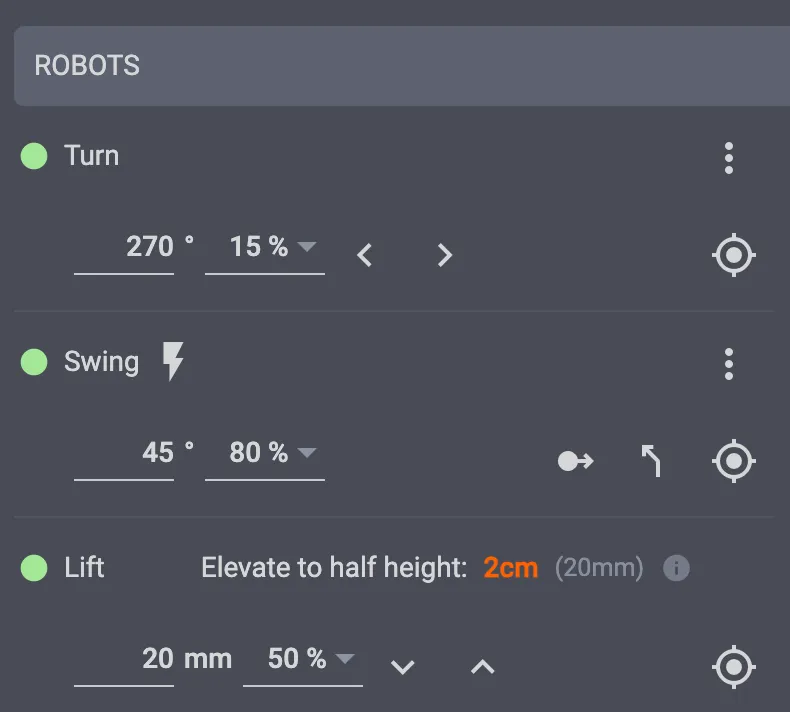
- Turn - 大多数PhotoRobot设备的标准,Turn使用户能够控制转盘围绕其中心的旋转
- 摆动 - 配置摄像机瞄准物体的垂直角度(即,在 0° 处与转盘保持水平,在 90° 处为俯视图,俯瞰产品)
- 提升 - 设置摄像机高程
在转弯、摆动和提升的可配置选项中找到位置、速度和校准设置:
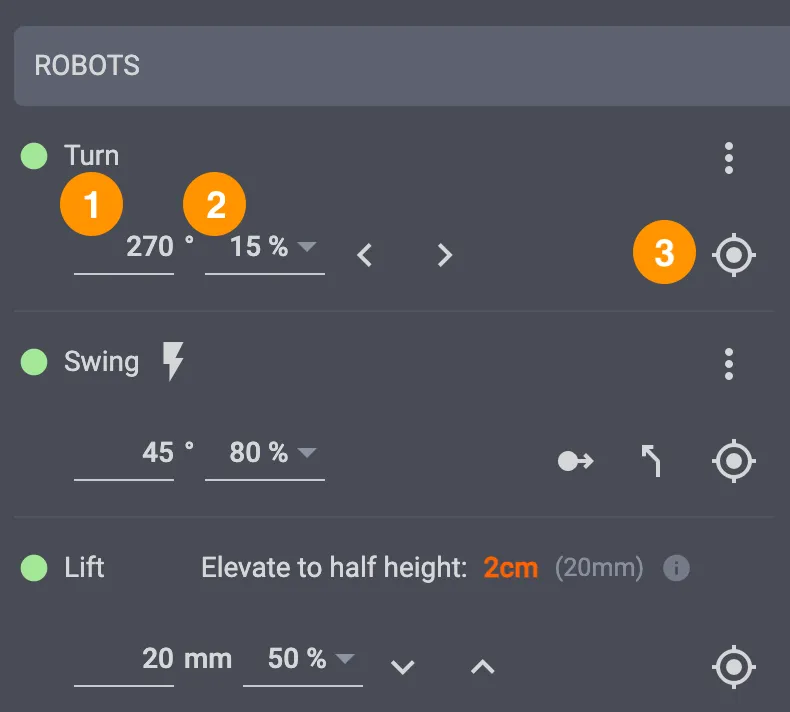
- 使用 设置位置状态 (1) 移动机器人。
- 使用速度输入 (2 ) 配置移动速度。
- 使用 校准 按钮 (3) 将机器人设置到其起始位置。
如果是第一次配置运动,请始终通过校准将机器人设置为其初始位置。
此外,从 CAPP 版本 2.13.3 开始,在捕获模式界面上为转弯和摆动提供了可配置的快速角度预设。单击任一字段旁边的三个垂直点 转弯/摆动,然后单击 配置角度预设。
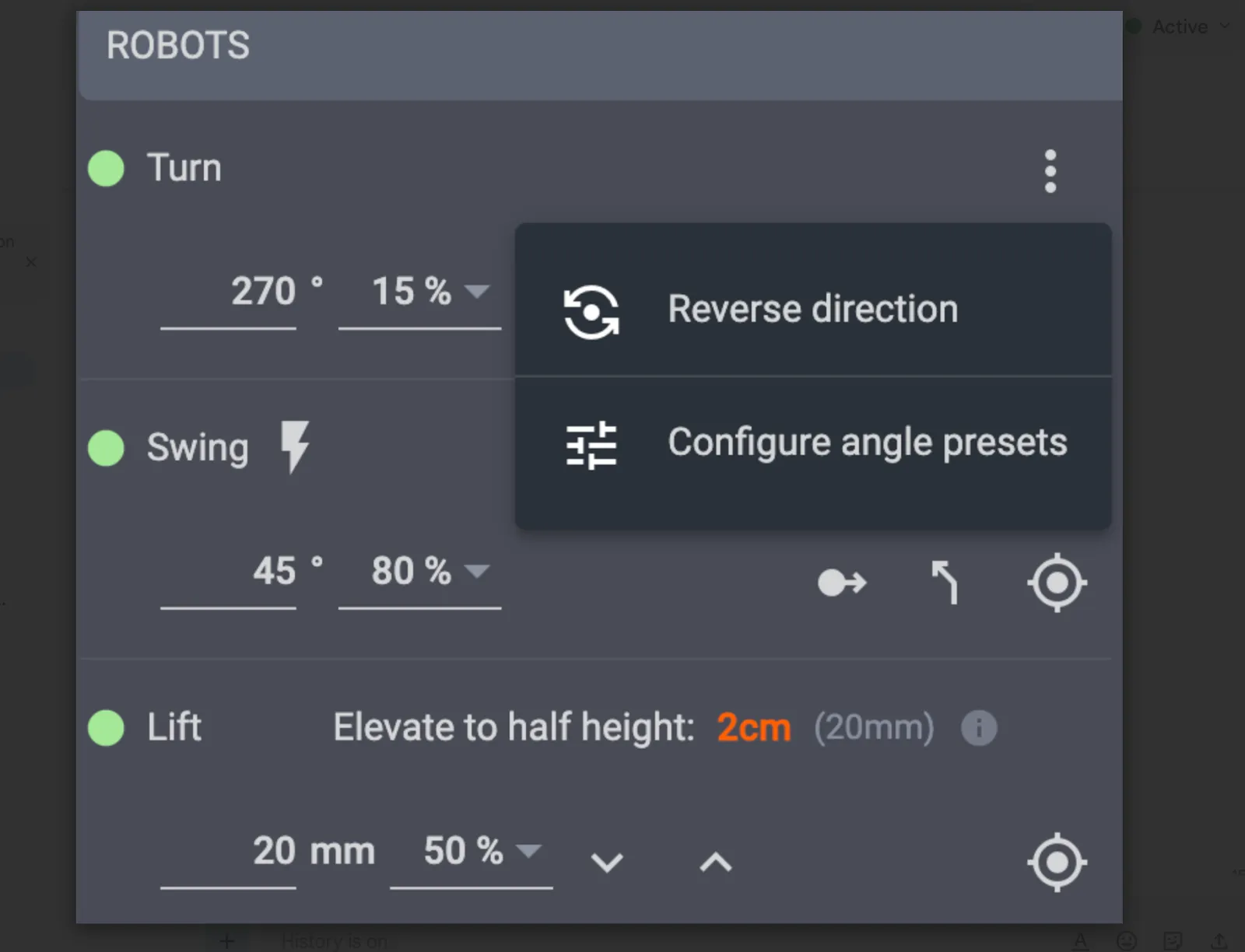
这将启动一个弹出窗口,供用户输入所需的转弯或摆动角度,以逗号分隔(最多 4),例如:0、90、180、270。
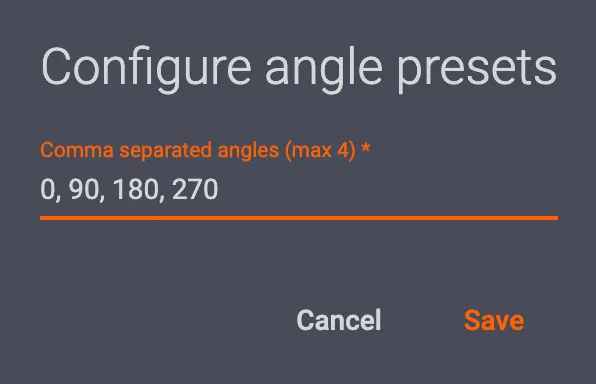
单击保存会将要捕获的预设摆动/转弯角度应用到机器人设置中。

相机
通过“摄像机”界面为一个序列启用一个或多个摄像机:

单击 实时取景 图标 (1) 可通过单击实时取景图片来启用对焦点选择。 通过“排除相机”图标 (2) 从序列中 排除相机 。在序列过程中,任何排除的相机都不会触发。通常,当用户通过WiFi连接额外的相机以手动拍摄照片以及预定义的旋转和静止图像时,这很有用。
注意:有关更多信息,请参阅PhotoRobot支持手册中的相机配置。
灯
CAPP 支持频闪灯(Broncolor 或 FOMEI)以及任何支持 DMX 的 LED 灯。有关如何在 CAPP 中安装和配置灯光的说明,请参阅 PhotoRobot 手册中关于设置工作区的部分。
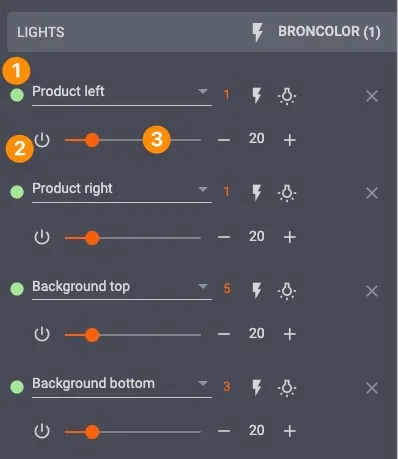
在 CAPP 灯光界面中,通过灯光位置菜单 (1) 为各个 灯光分配一个位置 。使用下拉菜单,选择自定义位置或预定义位置之一。预定义的位置包括:
- 产品左侧 / 产品右侧 – 用于从正面照亮产品的灯光
- 背景顶部 / 背景底部 - 从后面照亮背景的灯光,以创建白色背景
要定义自定义位置,请从位置列表选项中选择 自定义位置 。
通过 电源 按钮 (2) 打开或关闭灯光。例如,这对于自由掩码方法很有用,其中需要关闭前灯才能拍摄遮罩图像。
将“ 灯光强度 ”滑块 (3) 从左向右移动,以获得更暗或更亮的照明。注: 某些 DMX 控制的灯光还提供对色温的控制。
范围和预设
默认情况下,项目内所有文件夹的硬件配置都相同。
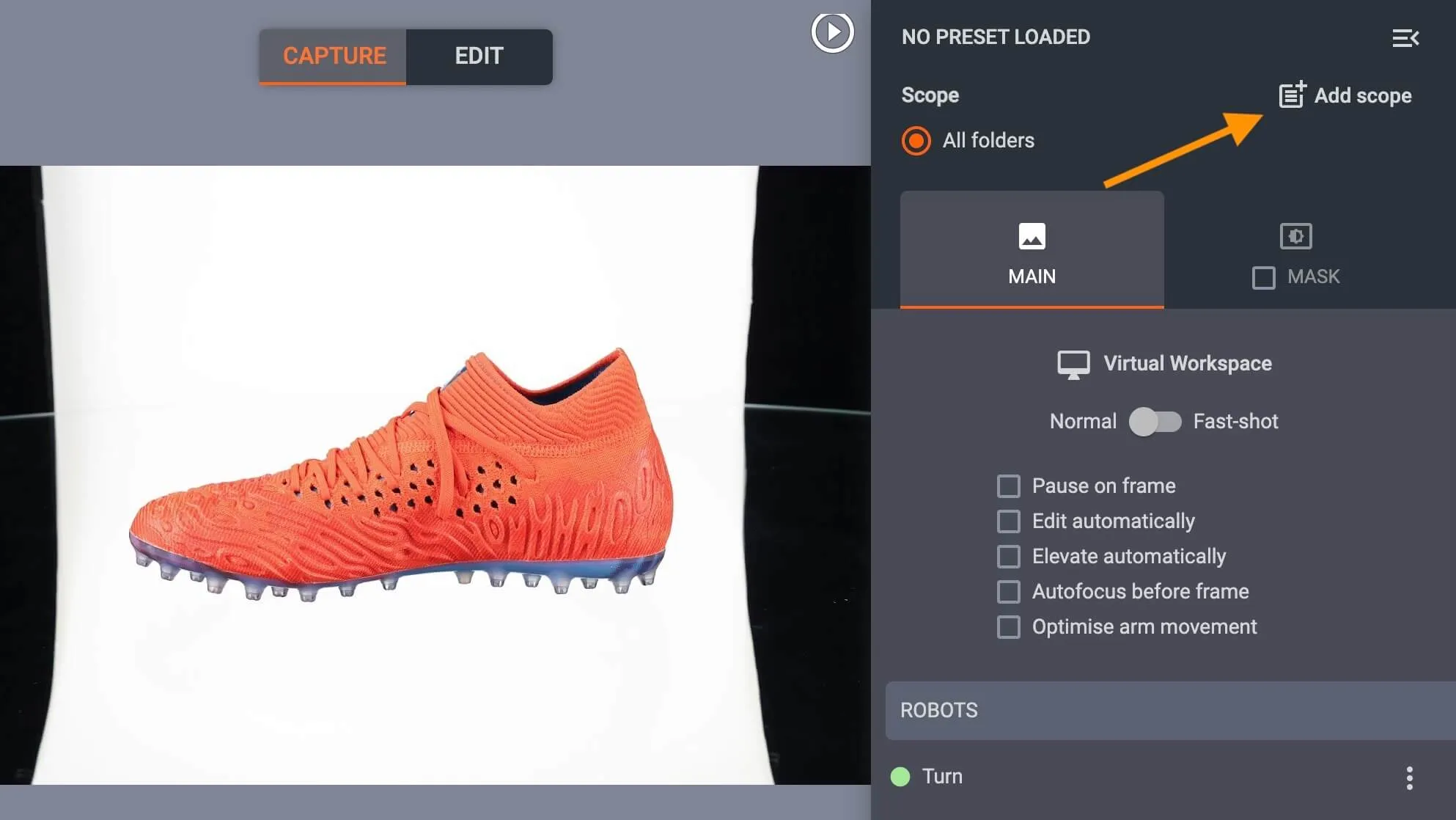
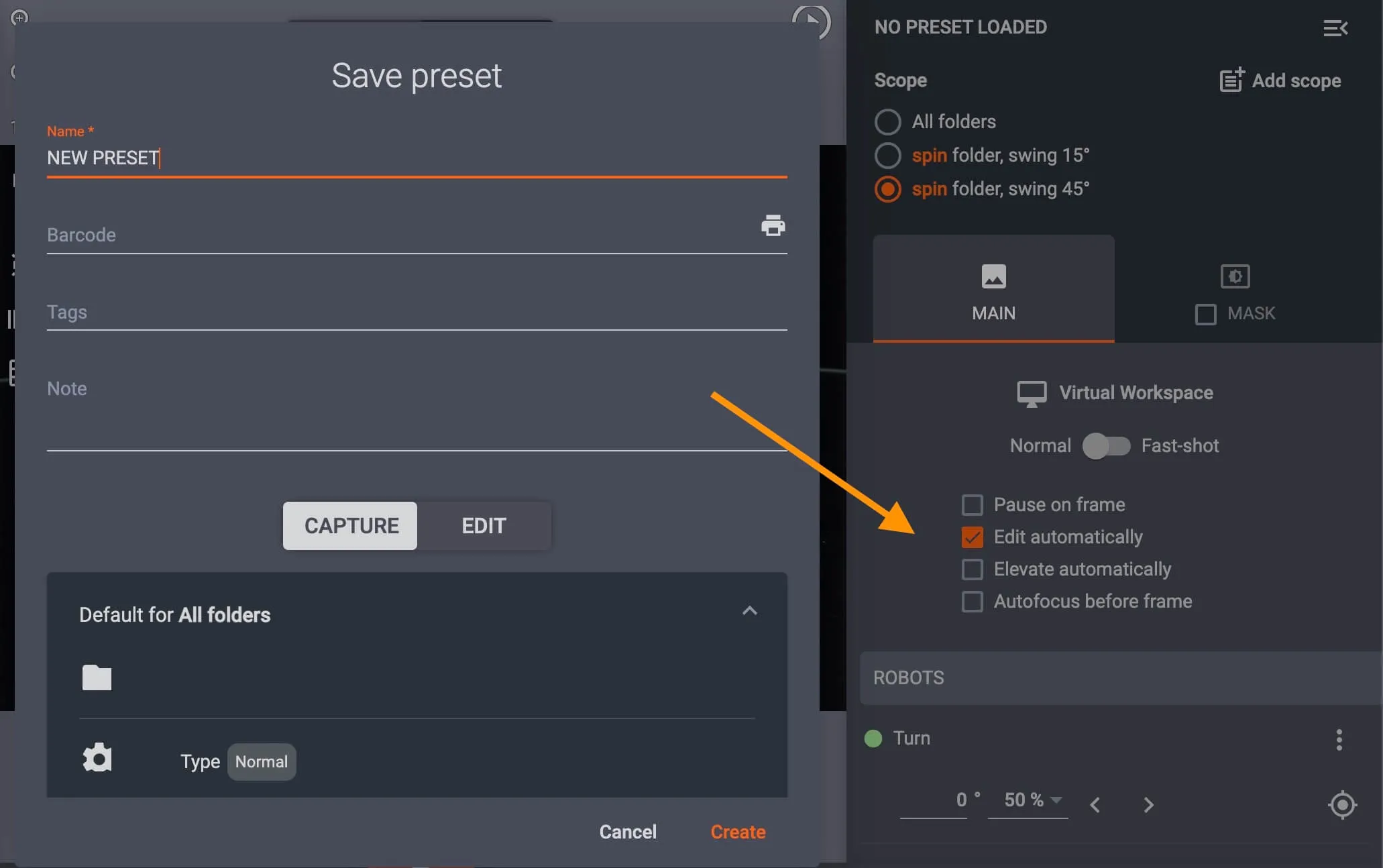
若要自定义硬件设置(按文件夹或按行),请使用 “添加作用域 ”按钮:
自定义配置后,通过预设下拉菜单在右上角加载或保存设置:
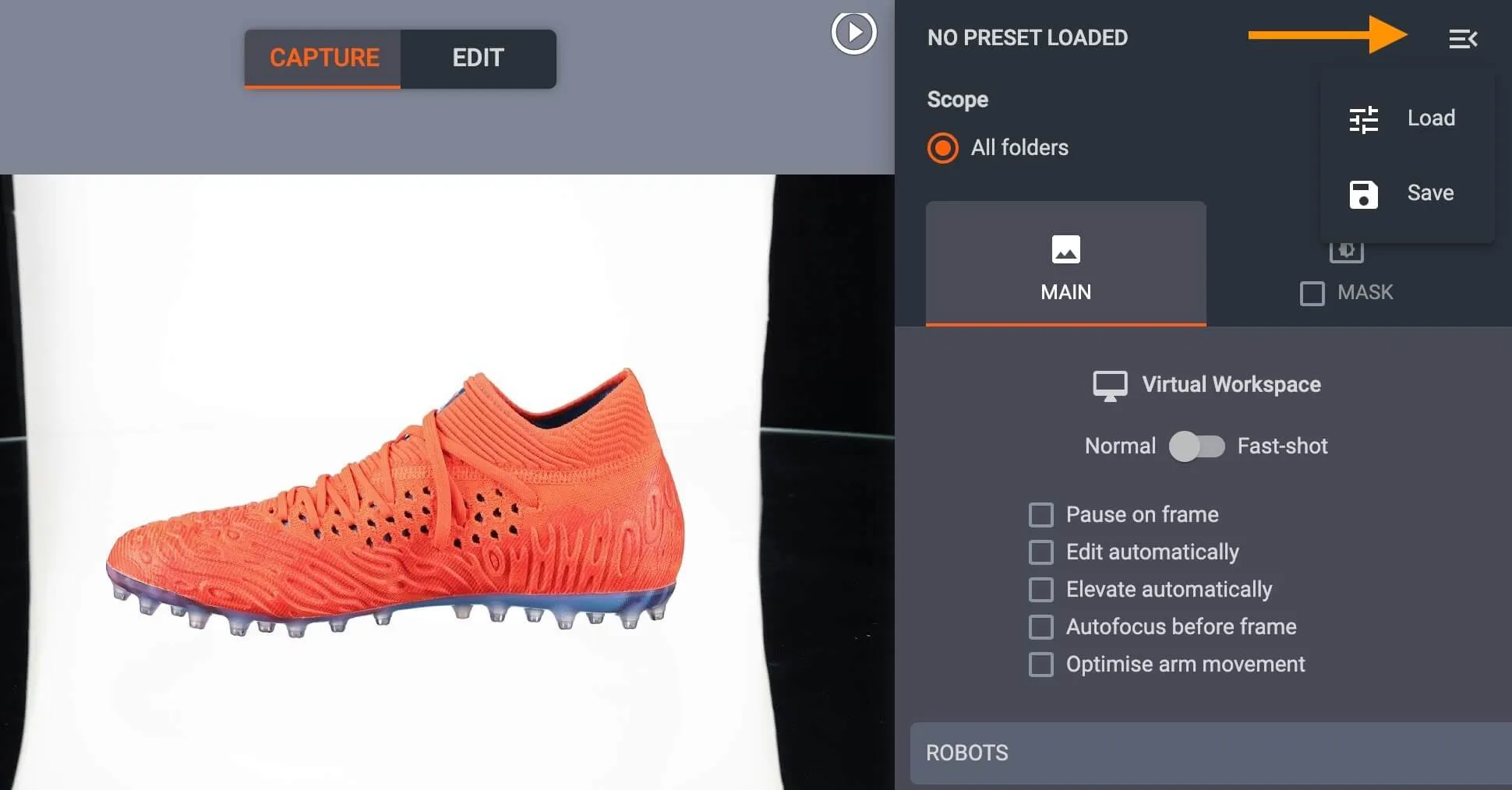
- 单击文件图标以保存所有拍摄设置,并在以后加载配置,以便在类似的照片拍摄中重复使用。
分配预设
在 CAPP 中,有 3 种方法可以为一个或多个项目加载/分配预设。
1.选择一个项目,然后通过界面右上角的下拉菜单图标加载预设:
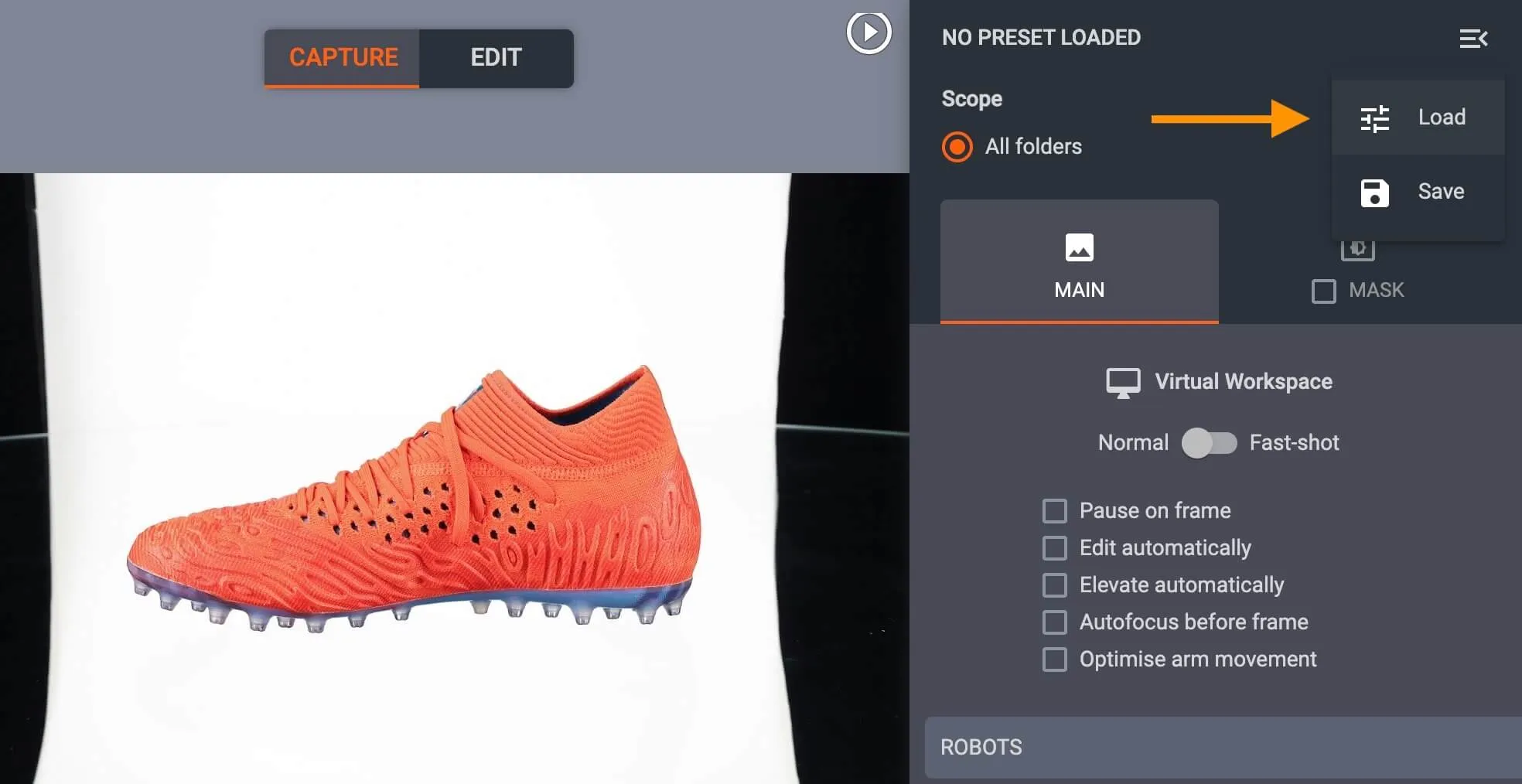
- 或者,使用热键“P”打开已保存的 Presets。然后,选择一个配置应用于项目。这将为将要拍摄的帧创建文件夹,以及所有捕获设置和预定义的编辑操作。
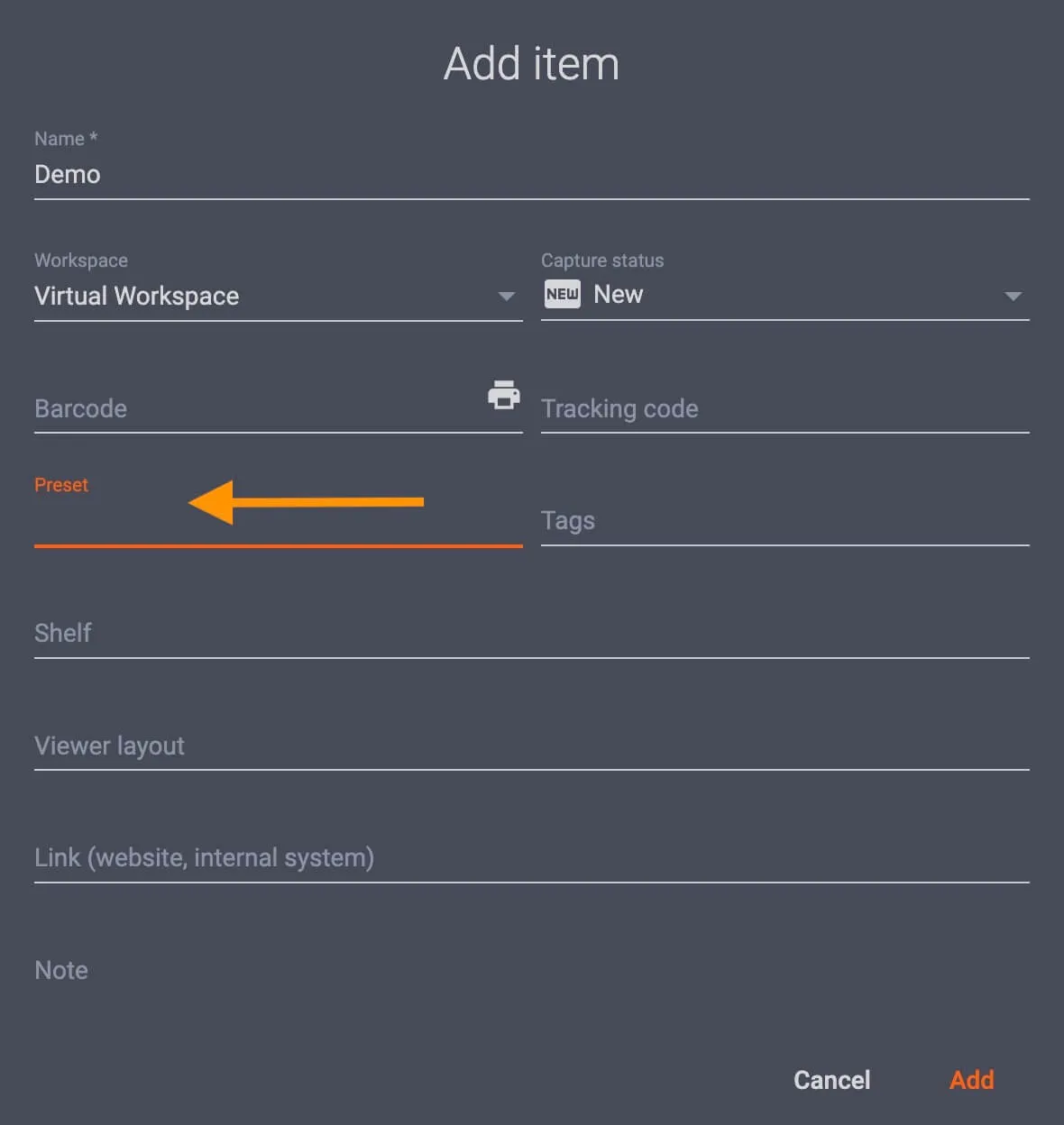
2. 创建项目时,用户可以通过点击“预设”字段,在“添加项目”菜单中选择配置。
- 要将预设分配给多个项目,请从“项目”菜单中选择项目,然后单击 “指定预设”:
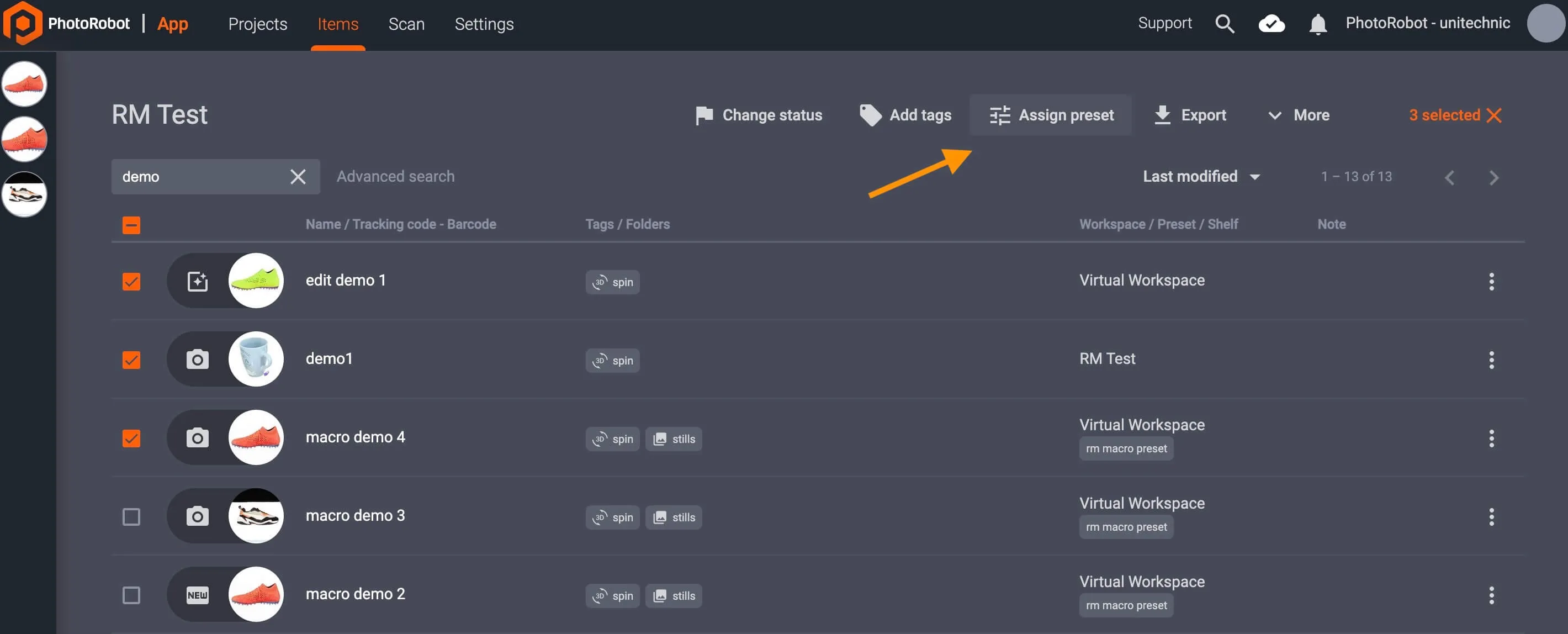
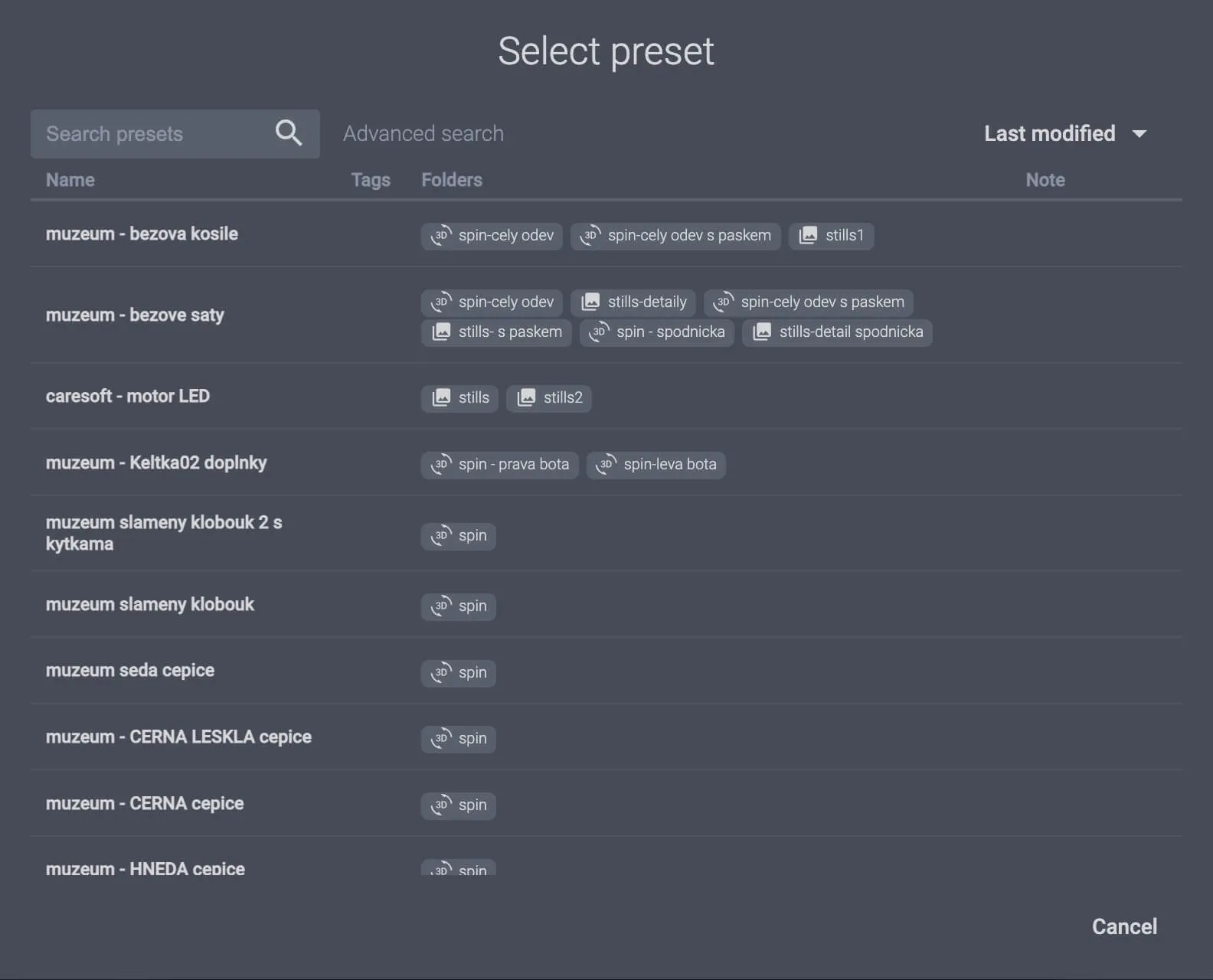
- 按名称选择预设,然后通过再次单击 “分配预设 ”将其分配给项目:

3. 或者,在“项目”菜单中,单击“ 导入 ”以从 CSV 导入项目:
- CSV 导入功能使PhotoRobot用户能够在 Excel 中创建项目及其配置,以导入到系统中。
- CSV 文件可能包含以下可自定义的列,以及一个按预设名称为项目分配预设的函数:
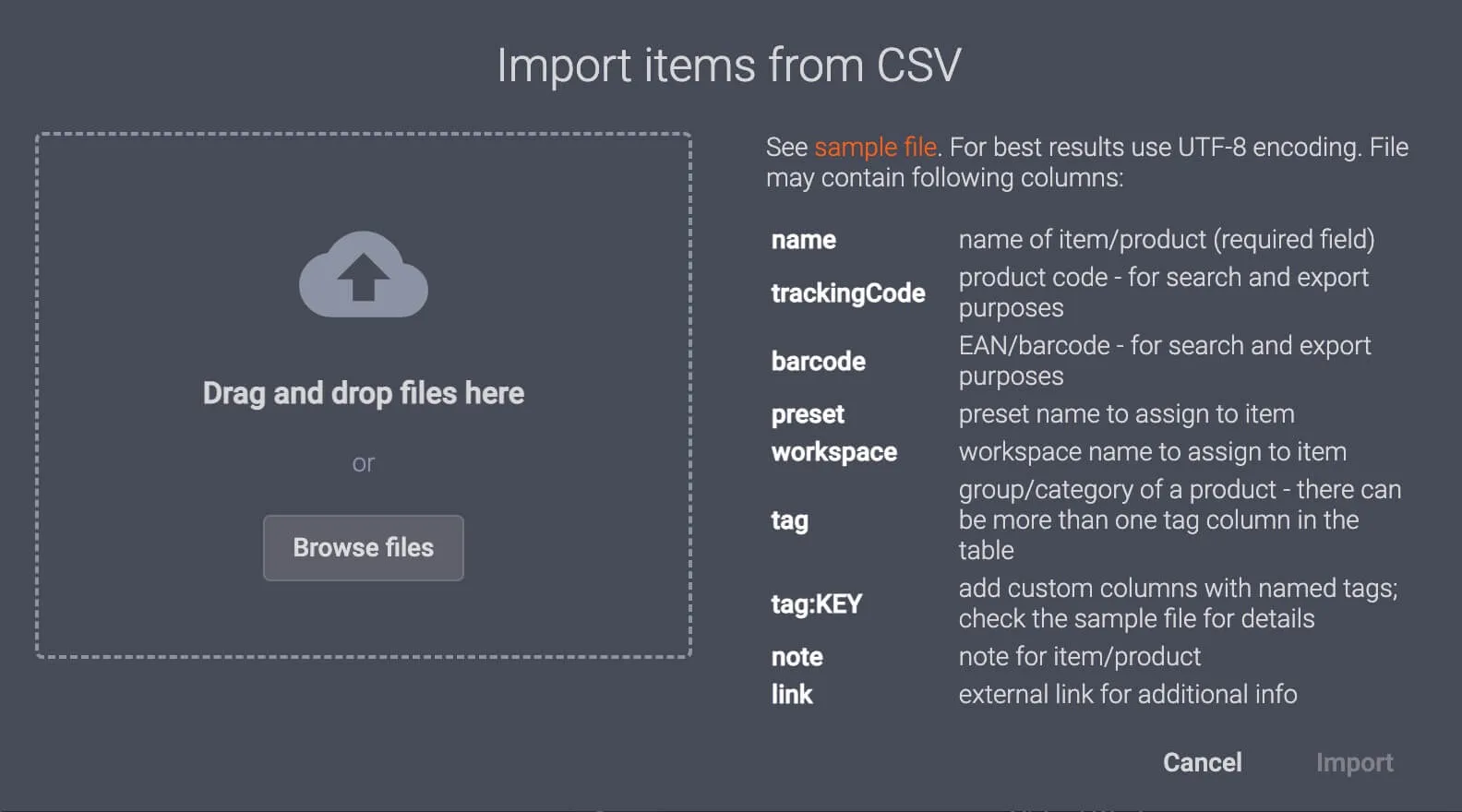
( ! ) - 注意:使用 CSV 导入时,建议使用 UTF-8 编码以获得最佳效果。
将项目分类到货架(购物车)
此外,在 CAPP 中,通过将项目分类到 货架 (或 购物车),您可以在将货架分配给项目后自动设置工作区和预设,从而简化工作流程。
在系统中创建货架(或购物车)代码有助于使用可配置的拍摄设置将商品分类。可以通过在应用程序中配置商品的设置来为商品分配货架,或者通过条形码阅读器支持的 CAPP 集成。
条形码阅读器支持使团队能够 打印唯一的条形码 ,他们只需扫描该条形码即可将物品分配到其货架。通过这种方式,团队可以扫描货架代码,然后扫描项目以快速分配其照片拍摄设置,而无需单击鼠标或移动到工作站计算机。
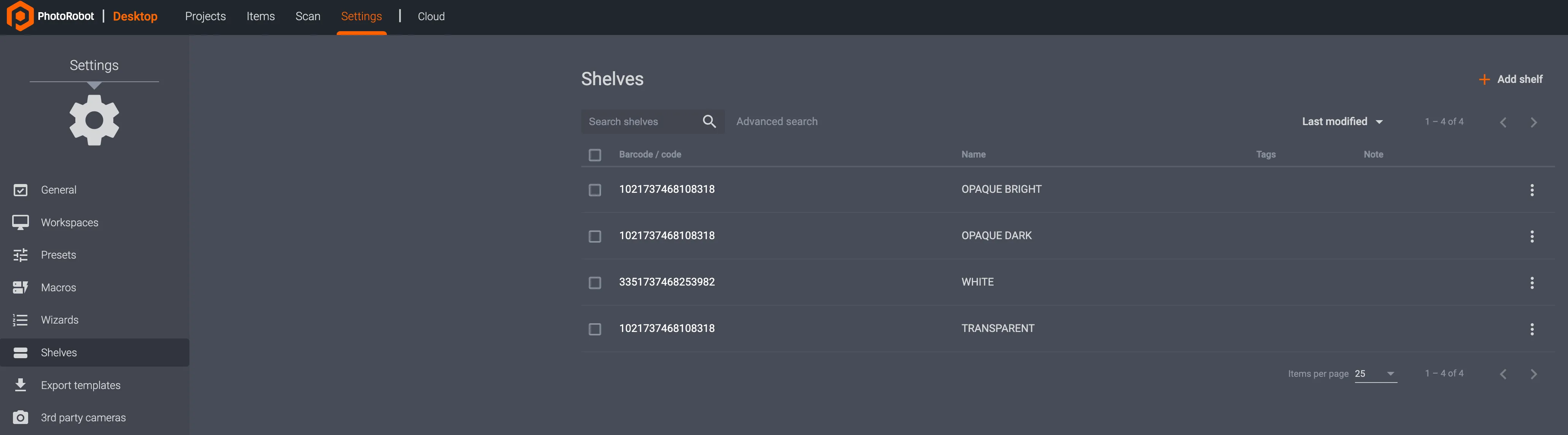
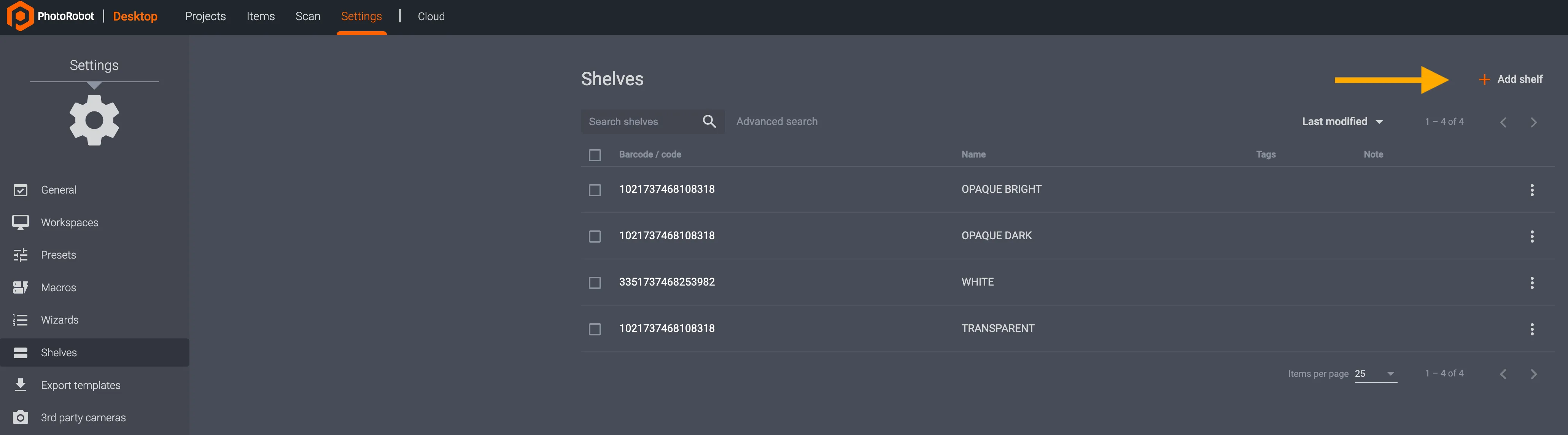
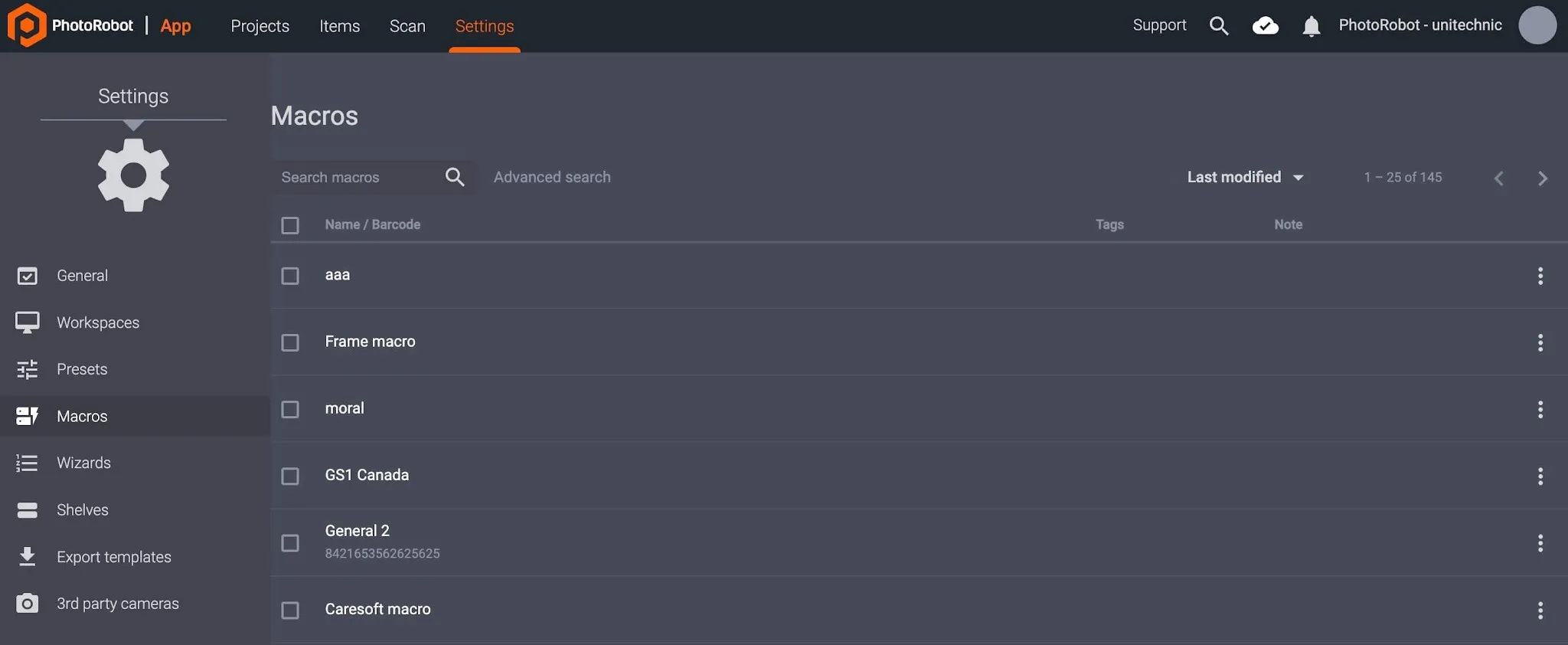
要访问 CAPP 中的 Shelves 设置,请在应用程序的本地或云版本中打开 Settings :
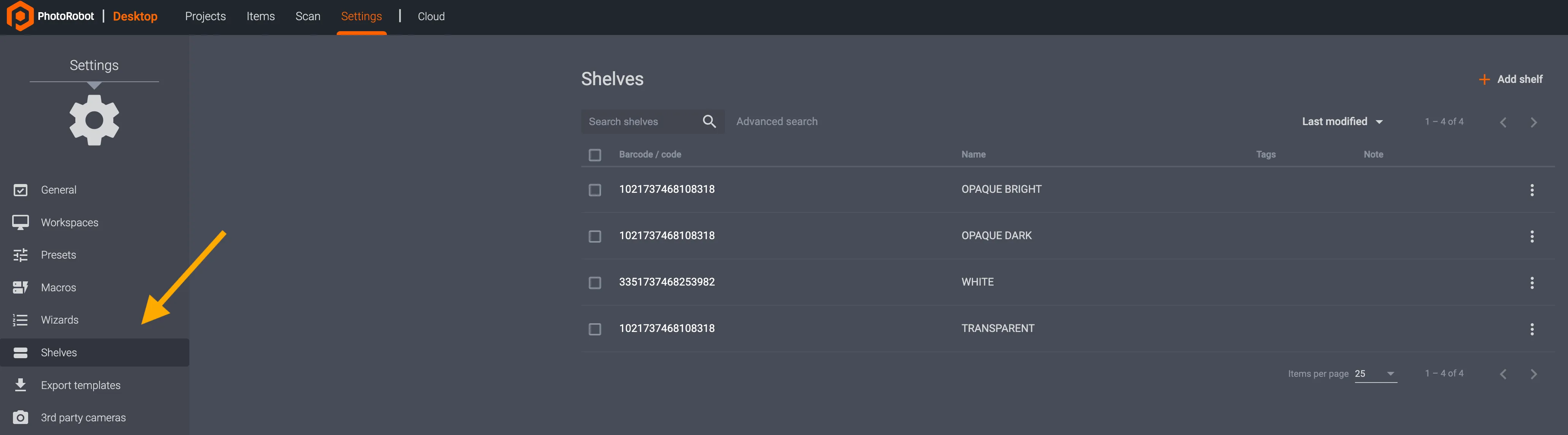
- 单击 Settings 界面左侧的 Shelves 菜单项,查看已保存的 Shelves(如果有)。
- 通过高级搜索搜索 Shelves,或通过货架条形码/代码左侧的框选择 Shelves。
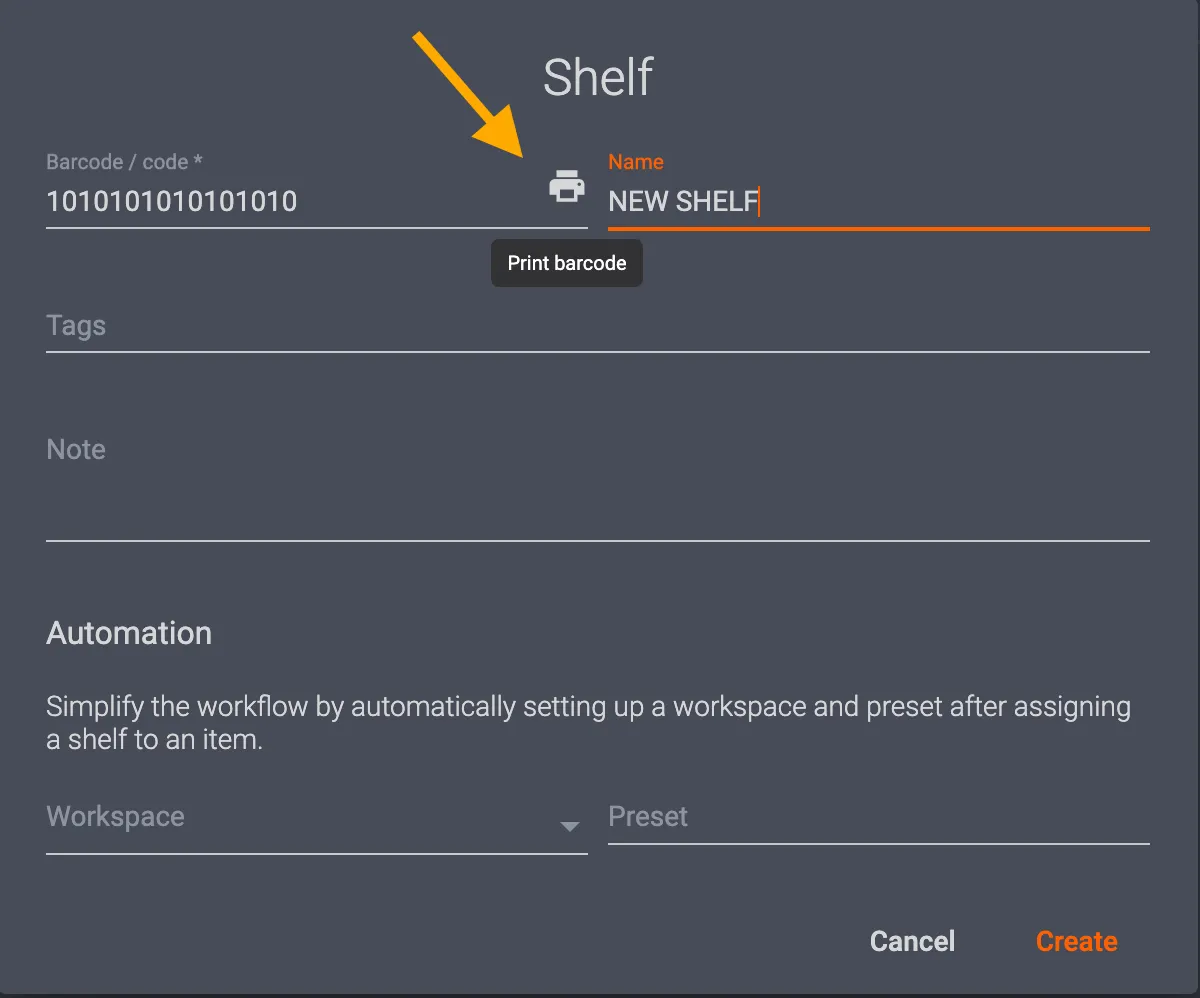
要创建新磁盘架,请使用 Shelves (磁盘架) 菜单右上角的 + Add shelf (添加磁盘架 ) 菜单:
然后,新的货架设置可以创建自定义 条形码/代码 以与条形码阅读器一起使用、 名称 创建、 标签、 注释、 工作区 和 预设 选择。
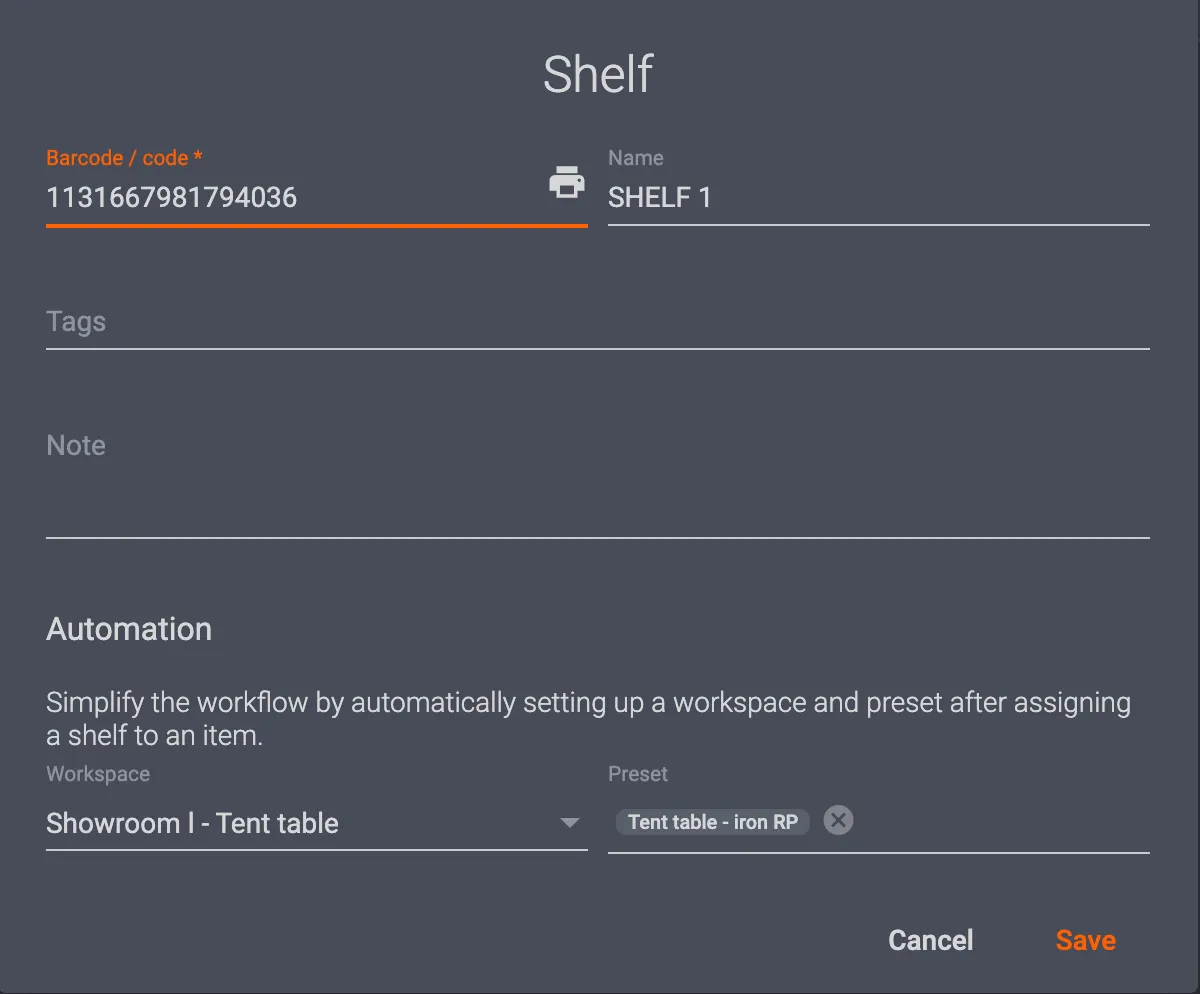
- 条形码/代码 可自定义以创建唯一的货架代码,系统可以使用该代码通过条形码阅读器分配设置。
- 名称 通常用于区分所拍摄对象的类型,例如:小、中和大项目;鞋类与珠宝、服装或任何类似类型的物品。
- 然后,工作区和预设字段可由机器人工作站(及其在工作室中的位置)进行配置,预设字段可用于搁架的自动捕捉和后处理设置。
- 在 界面右下角的 Save (保存) 在系统中创建搁板,以便将来通过应用程序或条形码阅读器进行分配。
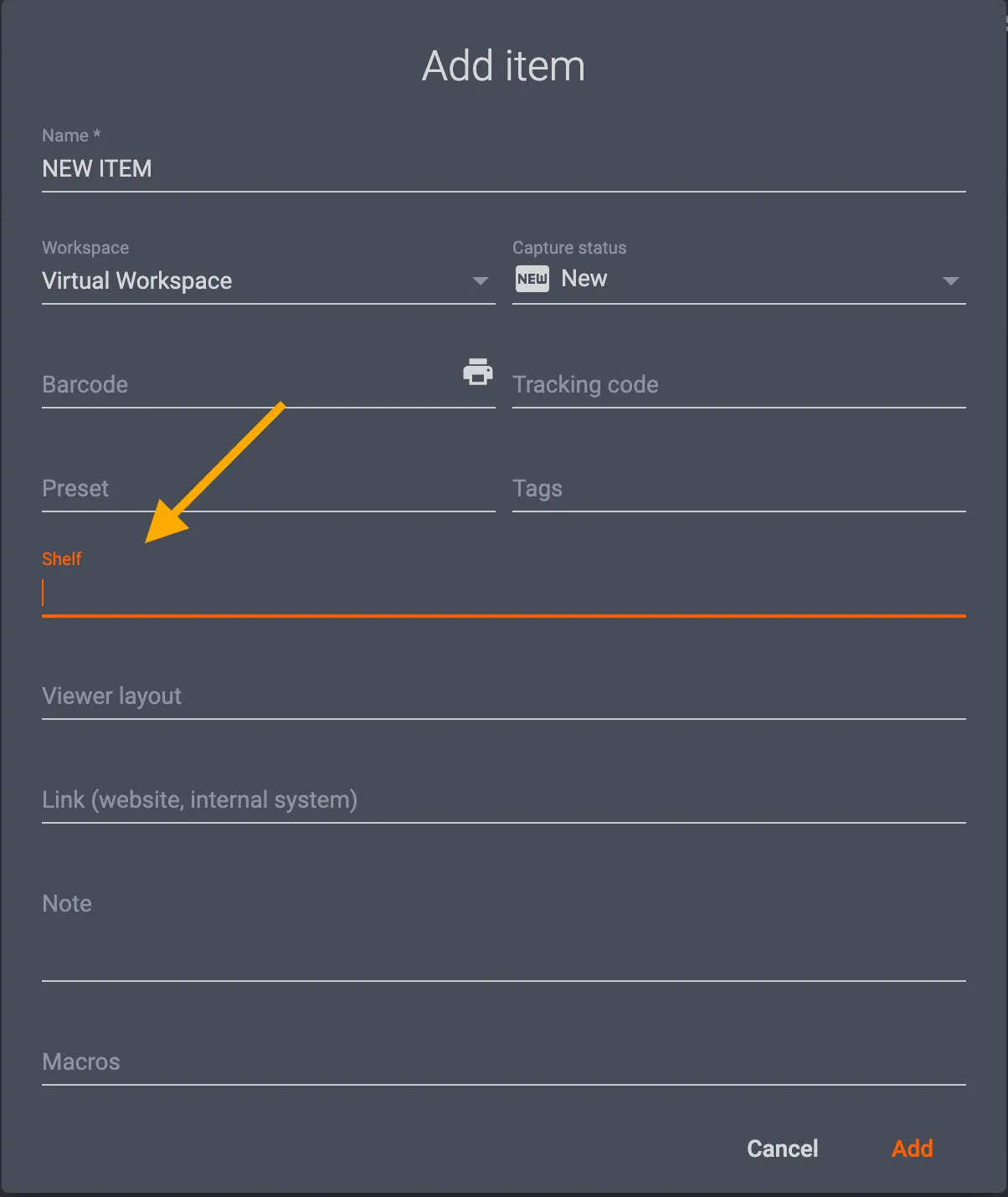
稍后,要将 Shelf 代码分配给应用程序中的新项目或现有项目,请选择 Item settings 菜单中的 Shelf 字段,然后选择 Shelf 以将其分配给该项目:
注意: 将 Shelf 应用于任何现有项目以在系统中捕获的过程相同。只需选择项目设置,然后配置 Shelf 字段:
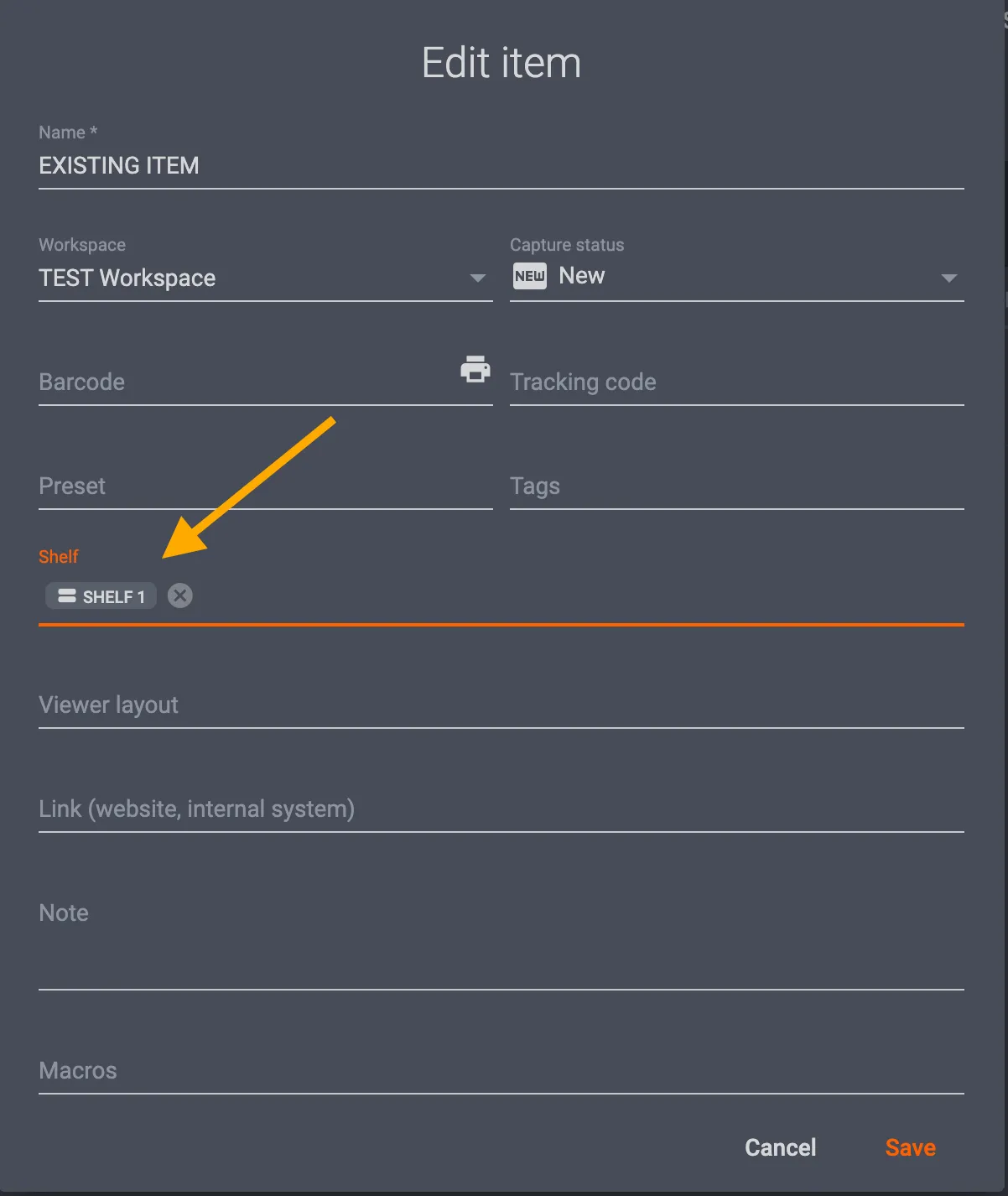
或者,如果使用集成的条形码阅读器,请打印唯一的货架代码,并将其与商品条形码一起使用,以按工作站和预设快速组织您的产品和拍摄列表。

添加设置范围操作
配置设置范围主要指示系统将捕获的图像保存到哪些文件夹、要捕获的帧以及捕获过程的设置。示波器设置还包括序列配置(正常与快速拍摄模式)、机器人速度、摄像机设置、灯光控制和预定义的编辑操作。
在拍摄项目之前,用户在系统中创建或分配预设。预设的设置可以应用于整个文件夹、特定项目或单个行和框架(在编辑模式下)。
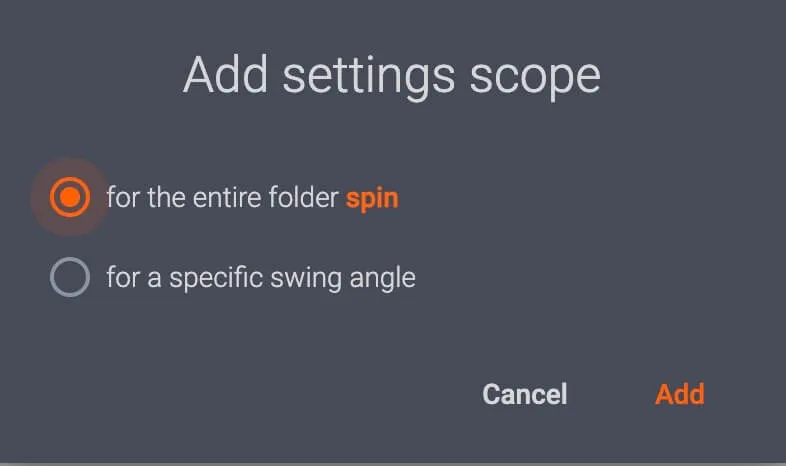
- 为整个文件夹旋转、特定摆动角度或仅当前图像(仅限编辑模式)选择设置范围。
- 每个设置范围都包含硬件配置、捕获设置以及一个或多个编辑操作。
为特定摆动角度添加设置范围
如果为特定摆动角度应用示波器设置,请指定将应用拍摄预设的角度(例如 15°、45° 等):
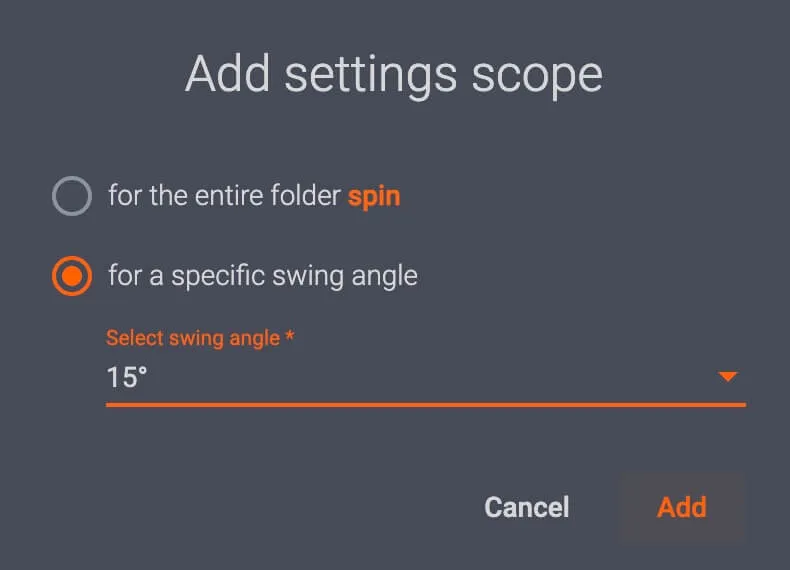
- 设置范围可以通过 “选择摆动角度”应用于一个或多个摆动角度。指定摆动角度,然后单击“ 添加 ”将范围设置分配给文件夹。
- 然后,带有分配预设的目标文件夹将显示在界面的右上角:
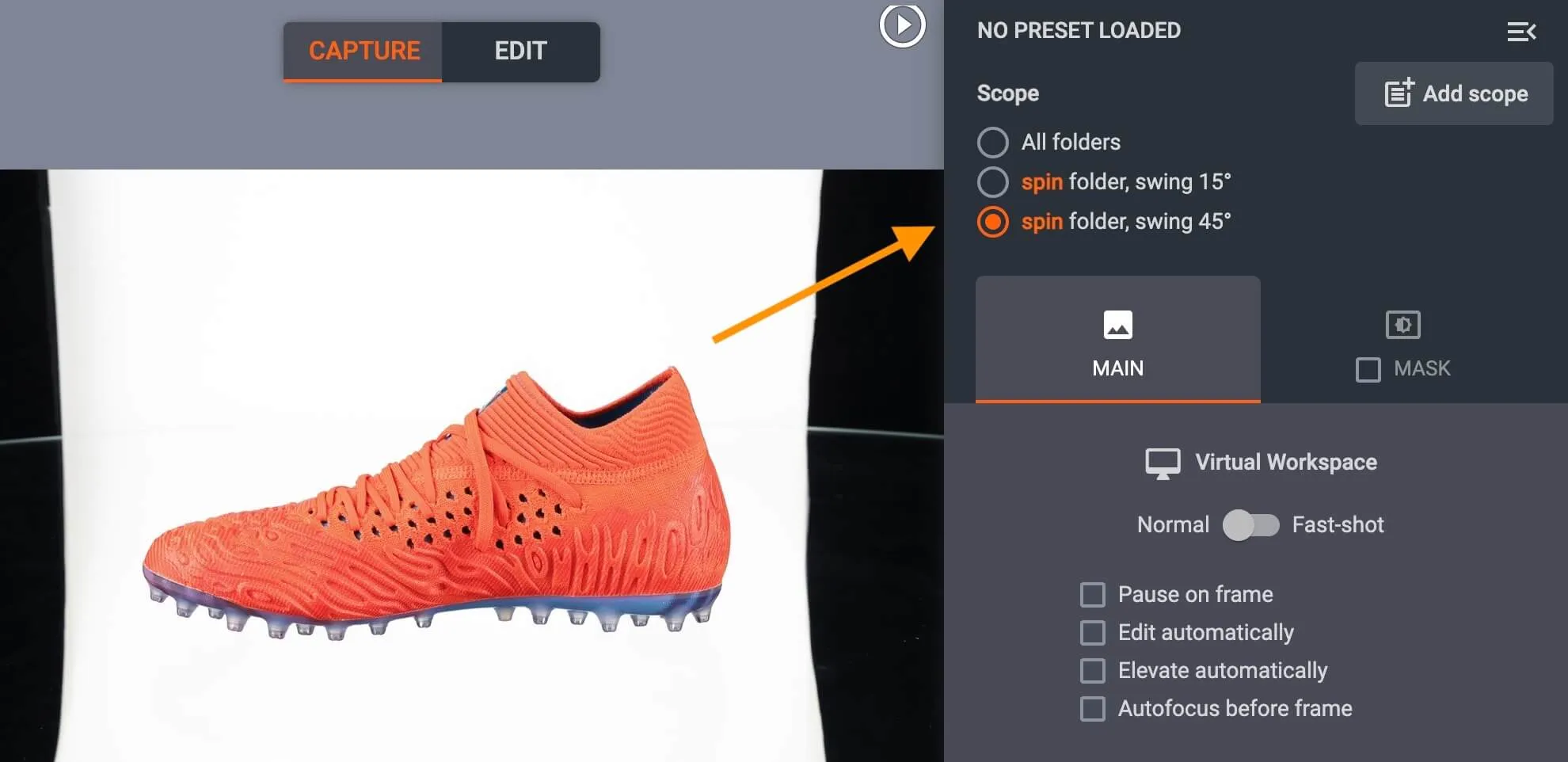
如果将不同的示波器设置应用于多个摆动角度,请单击特定的摆动角度以查看或配置分配给其文件夹的设置。
- 例如,可以为摆动角度为 15° 的旋转文件夹配置低强度光,为摆动角度为 45° 的旋转文件夹配置高强度光。
- 用户还可以将设置范围添加到静止图像文件夹或项目内的任何其他文件夹。
- 然后,系统将在捕获图像时自动应用设置范围。
若要查看或配置所有映像的设置范围,请单击 “所有文件夹”。配置设置范围后,单击开始按钮将使用其分配的预设开始捕获过程。
此外,如果配置了自动编辑,系统将捕获照片,并在单击开始按钮后自动应用预定义的 编辑 操作。
( ! )- 要查找有关所有编辑操作及其功能的更多信息,请参阅PhotoRobot用户支持手册 - 编辑图像。
宏功能 & 配置
CAPP 中的宏使用户能够定义项目及其文件夹(旋转、静止等)的捕获过程的命令。命令可以应用于单个或多个文件夹、运行序列、图像编辑、工作区、预设、复制图像设置和移动图像设置。用户还可以按名称、条形码、标签或注释进一步自定义宏。
注意:有关PhotoRobot宏的配置和使用的详细说明,请参阅PhotoRobot宏用户指南。了解宏如何实现摄影自动化魔力,跨多个文件夹和组件,并自动处理复杂任务。
PhotoRobot向导模式
CAPP 中的向导模式是手动硬件、相机和序列配置的替代方案。在使用中,向导模式使管理员或摄影师能够创建不同的向导,以简化生产线操作员的捕获模式。操作员随后可以在向导模式下启动 CAPP,该模式作为一个极其简单的界面,提供向导引导的步骤。此外,还有有限的控制功能,便于使用和入门。
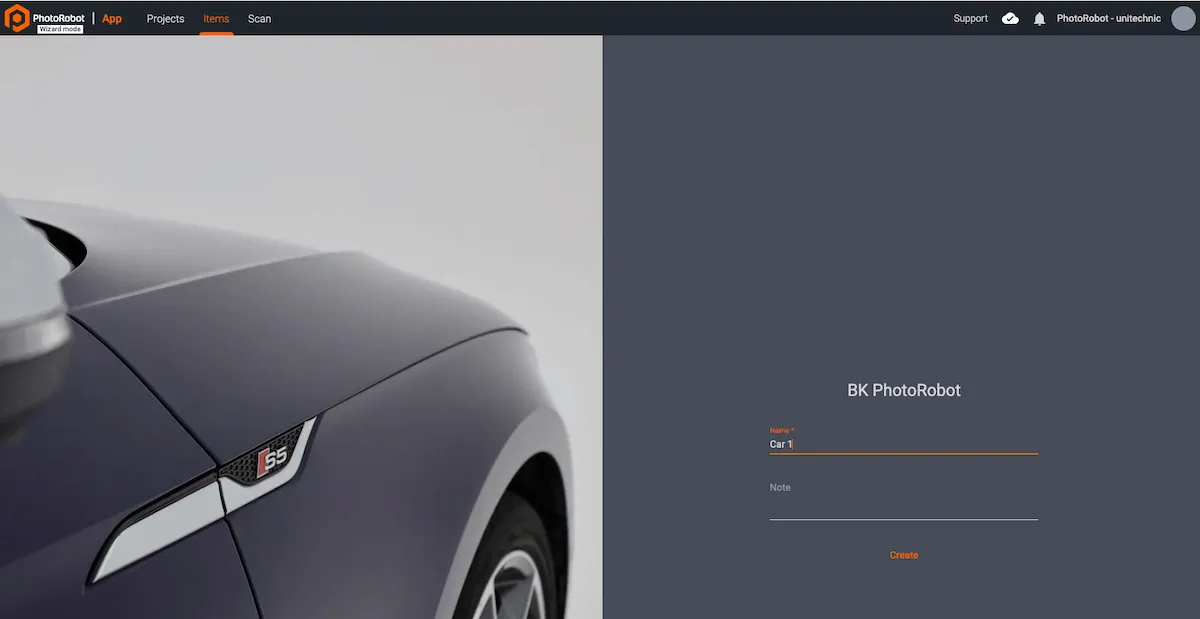
创建向导后,它会存储预设和工作区配置,以及操作员必须遵循的预定义步骤。操作员无法调整任何设置,并且必须完成每个步骤中的说明才能进入下一个流程。
注意:向导步骤以类似 JavaScript 的语言格式定义,并由 PhotoRobot 顾问编写脚本以实现自定义功能。用户还可以为初步实验或简单设置编写基本功能脚本。有关向导的技术配置和操作员使用的文档,请参阅PhotoRobot 向导模式用户手册。


EOS Rebel 系列


EOS DSLR 系列


EOS M 微 单镜系列


PowerShot 系列


特写/ 手持

佳能 EOS Rebel 系列提供适合初学者的 DSLR 相机,具有稳定的图像质量、直观的控制和多功能功能。这些相机是摄影爱好者的理想选择,提供可靠的自动对焦、可变角度触摸屏以及全高清或 4K 视频录制。
连接
分辨率 (MP)
分辨率
佳能 EOS DSLR 系列提供高质量的图像、快速的自动对焦和多功能性,使其成为摄影和视频制作的理想选择。
连接
分辨率 (MP)
分辨率
佳能 EOS M 微单镜系列将紧凑的设计与类似 DSLR 的性能相结合。这些相机具有可更换镜头、快速自动对焦和高质量图像传感器,非常适合在不牺牲图像质量的情况下寻求便携性的旅行者和内容创作者。
连接
分辨率 (MP)
分辨率
佳能 PowerShot 系列为休闲拍摄者和爱好者提供紧凑、用户友好的相机。从简单的傻瓜相机到高级变焦相机,它们提供便利性、稳定的图像质量以及图像稳定和 4K 视频等功能。
连接
分辨率 (MP)
分辨率


